Некоторые из нас не пользуются интернетом без VPN по тем или иным причинам: кому-то нужен выделенный IP, и проще и дешевле купить VPS с двумя IP, чем покупать адрес у провайдера, кто-то хочет получать доступ ко всем веб-сайтам, а не только разрешенным на территории РФ, третьим нужен IPv6, а провайдер его не предоставляет…
Чаще всего VPN-соединение устанавливают на самом устройстве, которое используется в определенный момент, что вполне оправданно, если у вас только один компьютер и один телефон, и вы их редко используете одновременно. Если же в вашей домашней сети множество устройств, или, например, есть такие, на которых VPN настроить нельзя, было бы удобнее поднимать туннель прямо на домашнем роутере, чтобы не задумываться о настройке каждого устройства по отдельности.
Если вы хоть раз устанавливали OpenVPN на свой маршрутизатор, вы, вероятно, были неприятно удивлены скоростью его работы. SoC'и даже дешевых роутеров без особых проблем пропускают через себя окологигабитный трафик, за счет выноса функций маршрутизации и NAT на отдельный чип, предназначенный исключительно для выполнения этой задачи, а основные процессоры таких роутеров довольно слабы, т.к. нагрузки на них практически никакой нет. Такой компромисс позволяет достигнуть высокой скорости работы роутера и заметно снизить цену готового устройства — маршрутизаторы с мощными процессорами стоят в несколько раз дороже, и позиционируются уже не только как коробка для раздачи интернета, но и в качестве NAS, торрентокачалки и домашней мультимедиа-системы.
Мой роутер, TP-Link TL-WDR4300, нельзя назвать новым — модель появилась в середине 2012 года, и обладает 560 МГц-процессором архитектуры MIPS32 74Kc, мощности которого хватает лишь на 20-23 Мб/с шифрованного трафика через OpenVPN, что по меркам скорости современного домашнего интернета совсем немного.
Как бы нам повысить скорость шифрованного туннеля? Мой роутер довольно функциональный, поддерживает 3x3 MIMO, да и вообще, хорошо работает, не хотелось бы его менять.
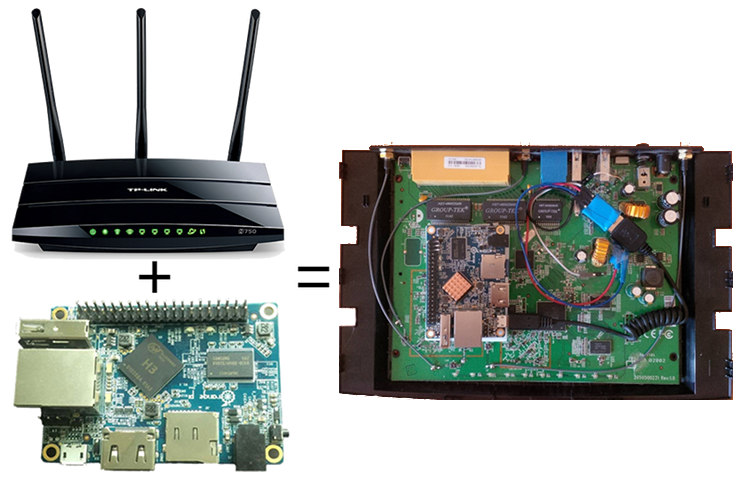
Так как сейчас принято делать 10-мегабайтные интернет-страницы, писать десктопные приложения на node.js и паковать их в 100-мегабайтный файл, наращивать вычислительные мощности вместо оптимизации, мы совершим нечто ужасное — переложим VPN-подключение на производительный одноплатный «компьютер» Orange Pi One, который установим в корпус роутера, не занимая существующие сетевые и USB-порты, всего за $9.99*!
* + доставка, + налоги, + на пиво, + MicroSD.

 Привет, Geektimes!
Привет, Geektimes! 
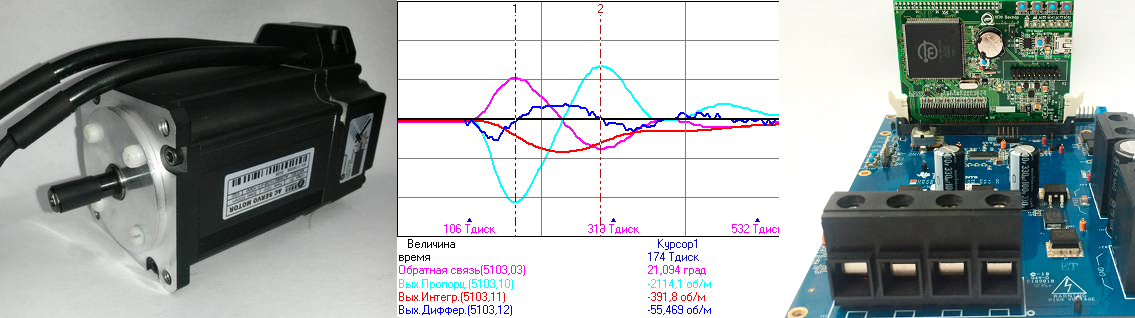

 Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно
Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги. Отчего разбираться в этом вопросе совсем не хочется. И даже самые простые объяснения всё равно держат путь через дифференциальные уравнения равновесия, векторные диаграммы и кучу другой математики. Из-за чего появляются примерно