Мы открываем кружок, в котором вы можете заниматься современной робототехникой и искусственным интеллектом на самом передовом уровне и задачах. В статье поговорим о том, как это будет и о текущих результатах в обучении роботов хождению.

Разработчик роботов
Мы открываем кружок, в котором вы можете заниматься современной робототехникой и искусственным интеллектом на самом передовом уровне и задачах. В статье поговорим о том, как это будет и о текущих результатах в обучении роботов хождению.

Буквально вчера в чате робототехников разгорелся спор в какой вуз идти учиться робототехнике, да так чтобы можно было заниматься с роботами на практике. Давайте совместно разберемся в этом вопросе.

Репортаж с прошедшего мероприятия по Robot Operating System (ROS) - фреймворку, который предназначен для разработки программного обеспечения роботов. В него входит целый набор различных инструментов, библиотек и определённых правил, цель которых — создать единую и удобную среду разработки роботов. Выкладываем видеозаписи докладов с подробными описаниями.

Всем привет! Сегодня мы отправимся в прошлое и вспомним, как проходил зимний ROS Meetup 3 февраля 2024 года: какие темы по LLM, Deep Learning и антропоморфным роботам были раскрыты и что нас ждет дальше?

Привет, Хабр! Сегодня поговорим о том, как молодому специалисту попасть на работу в центр робототехники. Расскажем об одном из путей (не реклама, но уникальная возможность для робототехников в России)

Решил написать свои размышления по поводу развития робототехники в россии и что должно быть в федеральной программе робототехники предложенной В.В. Путиным.

Привет, Хабр! Буквально на днях здесь публиковалась новость о конференции по Robot Operating System (ROS) которая пройдет 18 февраля — самому распространенному в мире фреймворку для роботов. Напомню, что она проводится Центром робототехники Сбера и группой организаторов российского сообщества ROS. В сегодняшней статье подробнее расскажу о конференции, содержании докладов с прошлой конференции 2020 года (если хотите услышать свежие доклады, приходите на конференцию 18 февраля) и о самом фреймворке. К докладам прошлого митапа приложены ссылки на видео и презентации спикеров.

Привет, Хабр! Сегодня предлагаем поговорить о робототехнике. Сейчас эта отрасль развивается, причём очень активно, так что сложные роботизированные системы постепенно становятся всё более доступными. Если ранее с ними работали такие компании, как Boston Dynamics и другие «киты» робототехники, то сейчас возможность изучать современных роботов в России появилась у школьников и студентов.
На фестивале «Наука 0+» молодые ученые из МИСИС, Хорошколы и ИТМО при поддержке Центра робототехники Сбера представили свои разработки в области шагающих роботов и совместный проект - “Робот-Кот”. Куратором проекта выступил вице-президент, директор управления исследований и инноваций Сбербанка, заведующий кафедрой инженерной кибернетики МИСИС Альберт Ефимов. А также Центр робототехники Сбера совместно с ИТМО показали демо алгоритма автономного подъема и спуска четвероногого робота по лестнице с использованием зрения.

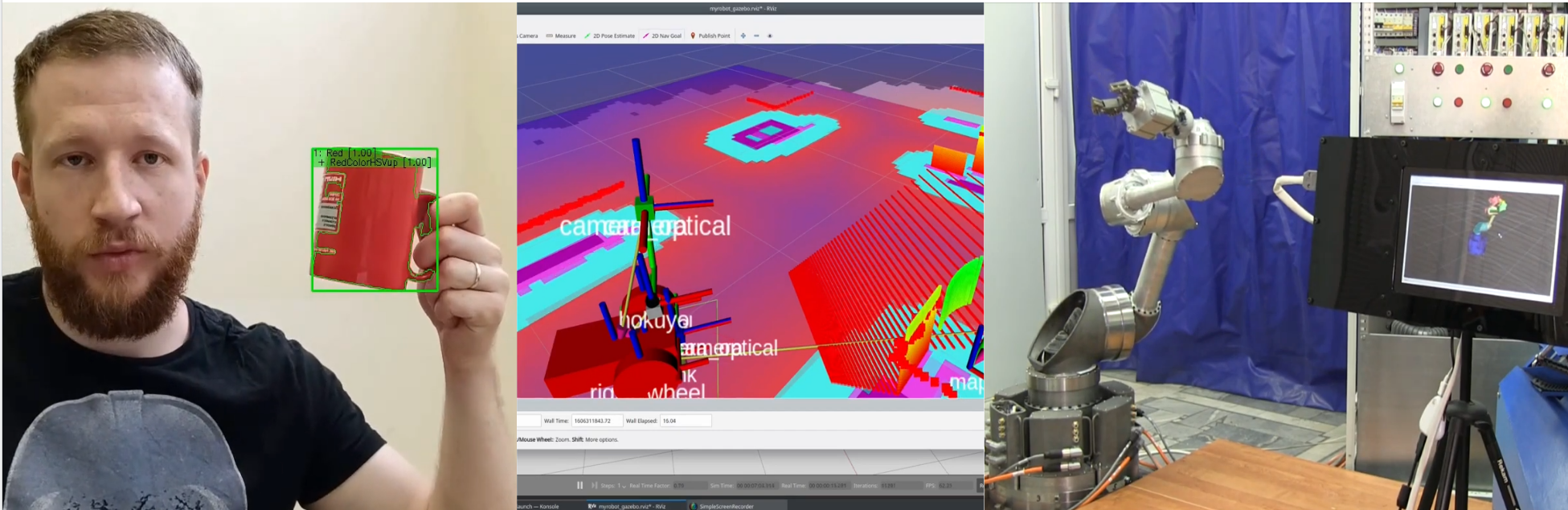
Провел в мае учебный курс для студентов ИТМО по Robot Operating System. Экзаменационным заданием было соревнование AutoRace, Visual SLAM и алгоритм походки четвероногого робота. Под катом подробности о курсе и видео с роботом собачкой.
Robot Operating System это фреймворк который позволяет эффективно программировать современных роботов.

В Robot Operating System сообществе мы решили в эру изоляции проводить специализированные мини митапы на темы связанные с робототехникой. Теперь каждая встреча будет посвящена одной теме, которую мы будем подробно обсуждать онлайн в ZOOM. Поэтому, каждый участник задающий вопросы и ведущий дискуссию важен, будьте активны!
Первая тема посвящена новому тренду в робототехнике - ROS2. Мы погрузимся подробно в технологию эффективной передачи данных между программными узлами робота, при соблюдении реалтайма и минимального расхода памяти. Расскажет про это специалист по разработке программного обеспечения для беспилотных автомобилей Роман Соколков.
Видеозапись доклада выложена под катом.

В Robot Operating System сообществе мы решили провести новогодний Робот ROS Огонек, по примеру известной передачи Голубой огонек. В программе видео трансляции живое общение робототехников, истории про проекты роботов, ответы на различные вопросы по робототехнике.
И начнем мы видео с распаковки и обзора четвероногого робота собаки.

Чем занимаются инженеры в лаборатории робототехники Сбера, как детское увлечение может перерасти в серьёзное хобби, а затем обеспечить работой и стать делом всей жизни — об этом расскажу я, Алексей Бурков, ведущий инженер в лаборатории робототехники Сбера.
Ниже приведён транскрипт видеороликов, которые вы найдёте под катом.