В прошлом посте мы рассказали, какие проекты интеллектуальной робототехники интересны Сбербанку. Сегодня разберем коботов: историю, классификацию, как на них можно зарабатывать или использовать для решения своих задач.

Источник: Universal Robots
Просто назвать своего робота коллаборативным мало. Он должен удовлетворять требованиям международных стандартов, основной из которых ISO/TS 15066:2016(американский аналог ANSI/RIA TR R15.606:2016). Хотя будет правильнее сказать, что это не стандарт, а техническая спецификация. Разница есть: ISO иногда разрабатывает технические спецификации до выпуска окончательных официальных стандартов. Это признание того факта, что современное состояние коллаборативной робототехники динамично, и будет развиваться со временем.
Формат технических спецификаций нужен для фиксации состояния «здесь и сейчас», чтобы сообщество могло работать, зная при этом, что в будущем будут изменения.
Согласно ISO кобот (сокращение от коллаборативный робот) – это робот, предназначенный для прямого взаимодействия с человеком в рамках определенного совместного пространства.
Коллаборативный робот МОЖЕТ использоваться для совместной работы (ISO 10218). Совместная работа – состояние, в котором специально спроектированная роботизированная система и оператор работают в рамках совместной рабочей области.
Совместное пространство – защищенное рабочее пространство, в котором робот и человек могут одновременно выполнять задания во время производственной операции.
Скорее всего, у вас возникли вопросы:
Проще говоря, это робот, который может выполнять задачи в общем пространстве с человеком, без вреда для него, то есть нахождение человека в рабочей зоне кобота абсолютно безопасно. Отличия кобота от привычного промышленного робота:
Раньше средства защиты людей заключались в том, чтобы отделить их от роботизированного оборудования физическими защитными устройствами, например, клетками.


Pixabay.com
Controleng.com
С появлением коллаборативных робототехнических систем эта парадигма сдвинулась: теперь можно работать вместе.


www.objektifhaber.com/aslan-gibi-dostluk-94036-haber
www.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-free
Почему это хорошо? Потому что мы получаем синергию сильных сторон робота (высокая скорость и точность при выполнении рутинных операций) и человека (творческое мышление, работа в нестандартных ситуациях). Это повышает производительность в промышленности, а значит, положительно влияет на экономику в целом.
ISO/TS 15066:2016 – это первая в мире спецификация требований безопасности для коллаборативных роботов. Документ разрабатывался комитетом (куда входили эксперты из 24-х стран и ведущих компаний-производителей) ISO c 2010 года. Он предназначен для дополнения требований и рекомендаций по совместной работе промышленного робота, описанных в стандартах ISO 10218-1 и ISO 10218-2 («Требования безопасности для промышленных роботов»), ISO/TS 15066 определяет требования безопасности для совместной работы промышленных робототехнических систем и рабочей среды. Документ дает руководство для тех, кто проводит оценку рисков при совместной работе людей и роботов.
В соответствии с ISO/TS 15066 есть 4 формы совместной работы:
Контролируемая остановка (Safety-rated monitored stop)
Эта форма используется, когда робот действует в основном самостоятельно, но иногда человеку нужно войти в рабочее пространство. Например, робот обрабатывает заготовку, но в середине технологического процесса человек должен сделать с ней операцию, которую не может сделать робот. Если человек войдет в заранее определенную зону безопасности – робот перестанет двигаться. При этом, питание на двигателях не пропадает – они встают на паузу. Это очень важный момент, ведь после того, как человек покинет зону безопасности, робот сразу возобновит работу. Это позволяет не терять время на полный перезапуск рабочей программы как в случае с полной остановкой робота. Если бы люди постоянно проходили мимо робота – он бы попросту не успевал поработать.
Ручное ведение (Hand guiding)
Эта форма совместной работы используется для точных операций с тяжелыми объектами (например, установки дверей автомобиля). Эта форма может использоваться для работы с обычными промышленными роботами, но с дополнительным устройством, которое «чувствует» силы, которые рабочий применяет к манипулятору, как правило, это силомоментный датчик на фланце робота.
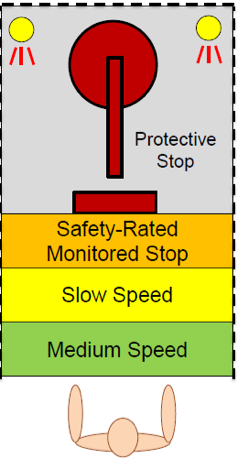
Контроль скорости и разделения зон (Speed and separation monitoring)
Здесь окружающая среда робота контролируется световыми барьерами безопасности, которая отслеживает положение людей, как и в первой форме совместной работы. Отличие заключается в сценарии: если в первой форме главная задача робота – остановка, то здесь – одновременная работа человека и робота. Поведение робота будет зависеть от заранее настроенных в его управляющей программе зон: по мере приближения человека, робот снижает скорость своих движений, а если человек подходит настолько близко, что столкновение неизбежно – происходит остановка. По мере отдаления человека, робот возобновляет работу и ускоряется.
Изображение: Roberta Nelson Shea – «ISO/TS 15066 Introduction»
Все три описанные выше формы совместной работы могут использоваться с обычными промышленными роботами, при условии наличия дополнительных устройств. Такие решения называются коллаборативные робототехнические системы. Отличие коллаборативного робота в том, что он может не использовать дополнительные (внешние) устройства обеспечения безопасности – они уже встроены в него. Еще одно важное отличие коллаборативных робототехнических систем от коллаборативных роботов состоит в том, что при совместной работе исключается контакт с человеком. А вот коллаборативный робот может контактировать с телом человека без вреда для него. Это достигается за счет ограничения мощности и усилия.
Ограничение мощности и усилия (Power and force limiting)
Большинство людей, представляя кобота, имеют ввиду робота, который использует именно эту форму совместной работы. Поэтому рассмотрим ее подробнее.
В «суставах» робота находятся силомоментные датчики, которые могут определить факт столкновения с человеком. Если датчики обнаруживают превышение допустимых усилий, робот останавливается. Эти роботы также предназначены для рассеивания сил на широкой поверхности, в случае удара – именно поэтому детали их корпуса чаще всего сделаны с округлыми формами. Функционал по ограничению мощности и силы, как правило, входит в штатное ПО.
— факторы конструкции робота (например, округлые формы, податливые материалы);
— подходящий выбор приложений и конструкция ячейки робота (например, захват, заготовка, траектория движения и т. д.).
Контакт в PFL бывает двух типов: переходный (transient) и квази-статический (quasi-Static).
Изображение: Bjoern Matthias – «Collaborative robots Power and Force Limiting»
Меры по снижению риска
Конечная конфигурация – это баланс между безопасностью и производительностью.
Техническая спецификация ISO/TS 15066 включает в себя таблицу, разработанную по результатам исследования болевого порога Университетом Майнца, в которой представлен список уровней силы и давления для проектирования усилий робота (исследовался болевой порог 100 людей в 29 болевых точках).
Источник: ISO/TS 15066:2016, Fig. 4, Fig A.1
Источник: ISO/TS 15066:2016.
Источник: R. Nelson Shea, NRSC 2016 Presentation. Used with permission
Помните: безопасность – это отсутствие травм.
Первого кобота разработали в 1996 году J. Edward Colgate и Michael Peshkin из Northwestern University (США). Для сравнения, обычных промышленных роботов к этому времени производили уже более 30 лет. Однако термин «кобот» придумал в результате конкурса на лучшее название другой человек из того же университета — Brent Gillespie. Термин так понравился журналу Wall Street Journal, что они включили его в список Words of Tomorrow и дали приз в 50$
Первый патент, относящийся к коботам был зарегистрирован в США в феврале 1996 года (US 5,923,129), а патент, использующий сам термин «кобот», в октябре 1997 (US 5,952,796).
Фото первых коботов можно посмотреть здесь
Разработку коботов в Northwestern University поддержали корпоративные фонды General Motors и Ford, а также национальный научный фонд США. В том же 1996 году ученые основали компанию Cobotics (в 2002 году ее поглотила Stanley Assembly Technologies).
Нынешнюю популярность коботы получили благодаря появлению компании Universal Robots (Дания) в 2005 году. Идея дешевого и простого в настройке и эксплуатации робота (по сравнению с промышленным) пришла основателям еще в 2003 году. Сделав несколько прототипов, в 2008 году компания выпустила первый серийный образец робота UR5 (самый популярный на сегодняшний день) и получила инвестиции от датского правительства. В 2012 году компания выпустила второго робота (UR10), а в 2015 была приобретена американской Teradyne за $285 млн.
Именно после успеха Universal Robots коботов начали делать корпорации, которые давно и успешно занимали рынок промышленных роботов (FANUC, ABB, KUKA, BOSCH и другие), а также стали появляться похожие стартапы: Rethink Robotics, Doosan Robotics, Techman Robot. Среди молодых проектов есть и выходцы из стран СНГ – белорусский стартап Rozum Robotics.
Сколько коботов в мире? Несмотря на растущую популярность коботов, они еще не выделены в отдельный класс в ежегодном исследовании World Robotics, которое проводит главный источник данных в отрасли Международная Федерация Робототехники (IFR).
В мире сейчас используется около 2 млн штук промышленных роботов (прогноз IFR на 2017 год). Сколько из них – коллаборативных точно неизвестно. Есть оценка Barclays research, согласно которой в 2017 году в эксплуатации находилось 32 тысячи коботов, подавляющее большинство из которых произведены Universal Robots.
Еще несколько лет назад коботы считались исключительно лабораторным оборудованием, которому нет места на производстве, однако возможность гибкой настройки и минимальные издержки на интеграцию позволили преодолеть психологический барьер. Сейчас роботы этого класса находят применение в легкой, пищевой промышленности и даже в автомобильной индустрии традиционно занятой классическими роботами.
Barclays Research оценивает рынок в 2017 году в $800 млн. Есть сведения, что до трети коботов продается в Китае. Рынок промышленных роботов в 2017 году IFR оценила в $13,1 млрд.
Прогноз на будущие годы:
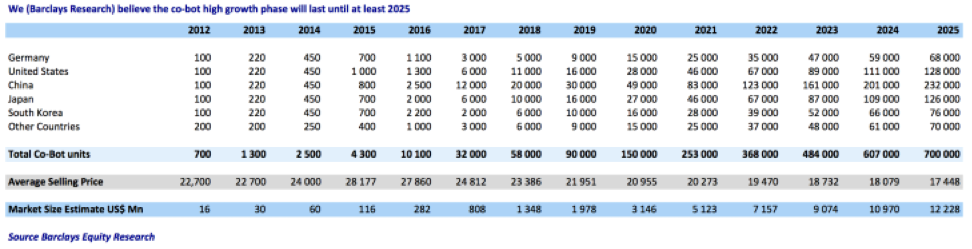
IFR прогнозирует общий размер рынка промышленных роботов к 2020 году в $23,2 млрд. Если сопоставить оценки Barclays и IFR, получится заметный рост доли коботов в общей сумме: с 6,1% в 2017 до 13,5% в 2020 – довольно динамично.
Что умеют делать коботы:
Драйверы роста коботов в ближайшие годы:
1. Коботы дешевле обычных промышленных роботов (~$25 тысяч вместо ~$50) -> снижается порог входа для малого и среднего бизнеса (МСБ).
2. Коботы проще в настройке: не обязательно уметь программировать. После одного дня обучения рабочий сможет настроить робота для выполнения задач средней сложности. Можете попробовать сами. То есть, не нужно нанимать сервисных инженеров или системных интеграторов -> снова снижается порог входа для МСБ.
3. Коботов проще перемещать: они легче, чем промышленные, им не нужна локальная инфраструктура в виде клетки -> привлекательность для МСБ повышается, так как можно быстро переналадить производство.
4. Повышение стоимости ручного труда из-за старения населения и уменьшения числа трудоспособных людей (ставка рабочего в час: €40 в Германии, €12 в США, €11 в восточной Европе и €9 в Китае. Стоимость работы кобота $6/час).
5. «Решоринг» синергия предыдущих факторов приводит к тому, что США и ЕС возвращают производство из Китая к себе на родину. Это может способствовать сокращению расходов на морскую логистику и повышению качества продукции.
6. Государственные программы, направленные на автоматизацию и роботизацию производства. Они могут стимулировать и поддерживать (в том числе финансово) приобретение и использование роботов:
— «Industry 4.0» в Германии;
— «Made in China 2025» в Китае;
— «National robotics initiative 2.0» в США.
Скачать таблицу
Как заработать на коботах:
Для использования коботов при решении своих задач необходимо определить потенциальные процессы (задачи) для автоматизации. Идеальными для первой автоматизации будут повторяющиеся задачи с высокой долей определенности (предсказуемые).
Здесь можно рассчитать ROI вашего проекта по роботизации
В статье использован перевод следующих публикаций:
Текст подготовили Альберт Ефимов и Денис Затягов из Лаборатории робототехники Сбербанка
Источник: Universal Robots
Часть 1. Что такое кобот
Просто назвать своего робота коллаборативным мало. Он должен удовлетворять требованиям международных стандартов, основной из которых ISO/TS 15066:2016(американский аналог ANSI/RIA TR R15.606:2016). Хотя будет правильнее сказать, что это не стандарт, а техническая спецификация. Разница есть: ISO иногда разрабатывает технические спецификации до выпуска окончательных официальных стандартов. Это признание того факта, что современное состояние коллаборативной робототехники динамично, и будет развиваться со временем.
Формат технических спецификаций нужен для фиксации состояния «здесь и сейчас», чтобы сообщество могло работать, зная при этом, что в будущем будут изменения.
Согласно ISO кобот (сокращение от коллаборативный робот) – это робот, предназначенный для прямого взаимодействия с человеком в рамках определенного совместного пространства.
Коллаборативный робот МОЖЕТ использоваться для совместной работы (ISO 10218). Совместная работа – состояние, в котором специально спроектированная роботизированная система и оператор работают в рамках совместной рабочей области.
Совместное пространство – защищенное рабочее пространство, в котором робот и человек могут одновременно выполнять задания во время производственной операции.
Скорее всего, у вас возникли вопросы:
- Станет ли робот коллаборативным, если я уберу защитное ограждение у обычного промышленного робота? Нет
- Станет ли робот коллаборативным, если я ограничу мощность и силу манипулятора? Нет, т.к. острым предметом даже с небольшой силой можно причинить ущерб человеку
- Если робот коллаборативный, это значит, что мне не нужно делать оценку рисков? Оценку рисков делать нужно.
Проще говоря, это робот, который может выполнять задачи в общем пространстве с человеком, без вреда для него, то есть нахождение человека в рабочей зоне кобота абсолютно безопасно. Отличия кобота от привычного промышленного робота:
- многие из них дешевле привычного промышленного робота: $24 тысячи вместо $40+ тысяч;
- проще устанавливать и настраивать (роботы весят порядка 30кг, нужна только розетка 220v, есть GUI);
- он гибкий, его легко переналаживать (интуитивно понятные интерфейсы программирования, не он безопасен для человека и окружения.
Раньше средства защиты людей заключались в том, чтобы отделить их от роботизированного оборудования физическими защитными устройствами, например, клетками.
Pixabay.com
Controleng.com
С появлением коллаборативных робототехнических систем эта парадигма сдвинулась: теперь можно работать вместе.
www.objektifhaber.com/aslan-gibi-dostluk-94036-haber
www.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-free
Почему это хорошо? Потому что мы получаем синергию сильных сторон робота (высокая скорость и точность при выполнении рутинных операций) и человека (творческое мышление, работа в нестандартных ситуациях). Это повышает производительность в промышленности, а значит, положительно влияет на экономику в целом.
ISO/TS 15066:2016 – это первая в мире спецификация требований безопасности для коллаборативных роботов. Документ разрабатывался комитетом (куда входили эксперты из 24-х стран и ведущих компаний-производителей) ISO c 2010 года. Он предназначен для дополнения требований и рекомендаций по совместной работе промышленного робота, описанных в стандартах ISO 10218-1 и ISO 10218-2 («Требования безопасности для промышленных роботов»), ISO/TS 15066 определяет требования безопасности для совместной работы промышленных робототехнических систем и рабочей среды. Документ дает руководство для тех, кто проводит оценку рисков при совместной работе людей и роботов.
В соответствии с ISO/TS 15066 есть 4 формы совместной работы:
- Контролируемая остановка (Safety-rated monitored stop);
- Ручное ведение (Hand guiding);
- Контроль скорости и разделения (Speed and separation monitoring);
- Ограничение мощности и усилия (Power and force limiting).
Рассмотрим каждую из них подробнее
Контролируемая остановка (Safety-rated monitored stop)
Эта форма используется, когда робот действует в основном самостоятельно, но иногда человеку нужно войти в рабочее пространство. Например, робот обрабатывает заготовку, но в середине технологического процесса человек должен сделать с ней операцию, которую не может сделать робот. Если человек войдет в заранее определенную зону безопасности – робот перестанет двигаться. При этом, питание на двигателях не пропадает – они встают на паузу. Это очень важный момент, ведь после того, как человек покинет зону безопасности, робот сразу возобновит работу. Это позволяет не терять время на полный перезапуск рабочей программы как в случае с полной остановкой робота. Если бы люди постоянно проходили мимо робота – он бы попросту не успевал поработать.
- Остановка обеспечивается без потери мощности двигателей (пауза, а не остановка).
- Оператор может взаимодействовать с роботом.
- Автоматическая работа может возобновиться, когда человек покидает рабочее пространство.
- В один момент времени может двигаться либо человек, либо робот.
- Может использоваться с обычными промышленными роботами, но нужно добавить световые барьеры безопасности (лазерные дальномеры, фотодетекторы).
Ручное ведение (Hand guiding)
Эта форма совместной работы используется для точных операций с тяжелыми объектами (например, установки дверей автомобиля). Эта форма может использоваться для работы с обычными промышленными роботами, но с дополнительным устройством, которое «чувствует» силы, которые рабочий применяет к манипулятору, как правило, это силомоментный датчик на фланце робота.
- Оператор находится в непосредственном контакте с роботом.
- Робот находится под ручным управлением.
- И человек, и робот могут двигаться одновременно (движения контролируются человеком).
- Могут использоваться обычные промышленные роботы.
- Требуется дополнительное оборудование (силомоментный датчик).
Контроль скорости и разделения зон (Speed and separation monitoring)
Здесь окружающая среда робота контролируется световыми барьерами безопасности, которая отслеживает положение людей, как и в первой форме совместной работы. Отличие заключается в сценарии: если в первой форме главная задача робота – остановка, то здесь – одновременная работа человека и робота. Поведение робота будет зависеть от заранее настроенных в его управляющей программе зон: по мере приближения человека, робот снижает скорость своих движений, а если человек подходит настолько близко, что столкновение неизбежно – происходит остановка. По мере отдаления человека, робот возобновляет работу и ускоряется.
- Скорость робота уменьшается, по мере приближения человека.
- Робот останавливается, когда может произойти столкновение с человеком.
- Человек и робот могут перемещаться одновременно.
- Может использоваться с обычными промышленными роботами, но нужно добавить световые барьеры безопасности (лазерные дальномеры, фотодетекторы).
- Используется для операций, требующих частого присутствия персонала.
Изображение: Roberta Nelson Shea – «ISO/TS 15066 Introduction»
Все три описанные выше формы совместной работы могут использоваться с обычными промышленными роботами, при условии наличия дополнительных устройств. Такие решения называются коллаборативные робототехнические системы. Отличие коллаборативного робота в том, что он может не использовать дополнительные (внешние) устройства обеспечения безопасности – они уже встроены в него. Еще одно важное отличие коллаборативных робототехнических систем от коллаборативных роботов состоит в том, что при совместной работе исключается контакт с человеком. А вот коллаборативный робот может контактировать с телом человека без вреда для него. Это достигается за счет ограничения мощности и усилия.
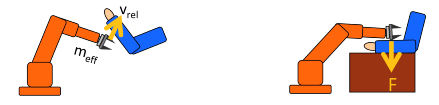
Ограничение мощности и усилия (Power and force limiting)
Большинство людей, представляя кобота, имеют ввиду робота, который использует именно эту форму совместной работы. Поэтому рассмотрим ее подробнее.
В «суставах» робота находятся силомоментные датчики, которые могут определить факт столкновения с человеком. Если датчики обнаруживают превышение допустимых усилий, робот останавливается. Эти роботы также предназначены для рассеивания сил на широкой поверхности, в случае удара – именно поэтому детали их корпуса чаще всего сделаны с округлыми формами. Функционал по ограничению мощности и силы, как правило, входит в штатное ПО.
- Сила и мощность робота контролируются так, что случайный контакт между роботом и оператором не причинит вреда.
- Человек и робот могут перемещаться одновременно.
- Возможные меры по снижению риска:
— факторы конструкции робота (например, округлые формы, податливые материалы);
— подходящий выбор приложений и конструкция ячейки робота (например, захват, заготовка, траектория движения и т. д.).
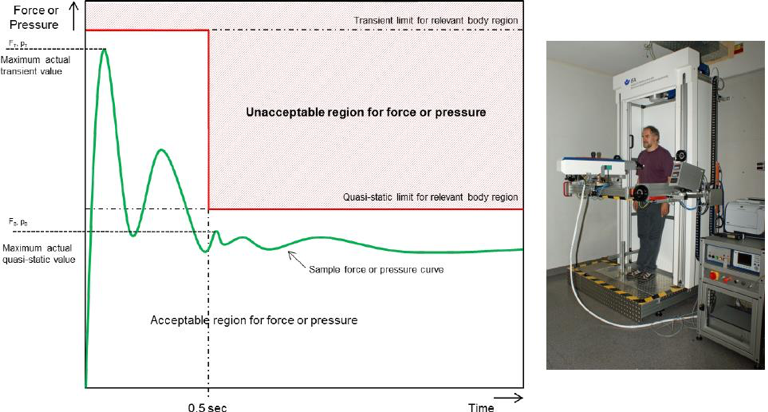
Контакт в PFL бывает двух типов: переходный (transient) и квази-статический (quasi-Static).
| Переходный контакт |
Квази-статический контакт |
|
| Описание |
Контактное событие «короткое» (<50 мс). Часть человеческого тела обычно может отскочить. |
Контакт может быть долгим. Часть человеческого тела может быть захвачена. |
| Критерии пределов (то, чем нужно управлять) |
Импульсное усилие, давления, напряжения. Передача энергии, удельная мощность. |
Пиковые силы, давления, напряжения |
| Доступность в конструкции/контроле |
Положение робота, полезная нагрузка. Скорость (относительная). Область контакта, продолжительность. |
Сила (крутящие моменты звеньев, положение). Площадь контакта, длительность. |
Изображение: Bjoern Matthias – «Collaborative robots Power and Force Limiting»
Меры по снижению риска
| Переходный контакт |
Квази-статический контакт |
|
| Конструкция |
Уменьшение эффективной массы. Увеличение площади контакта. Увеличение продолжительности контакта. |
Увеличение площади контакта. |
| Управление |
Уменьшение относительной скорости. Уменьшение эффективной массы подходящим выбором положения. |
Уменьшение максимального момента и силы. Уменьшение длительности контакта. |
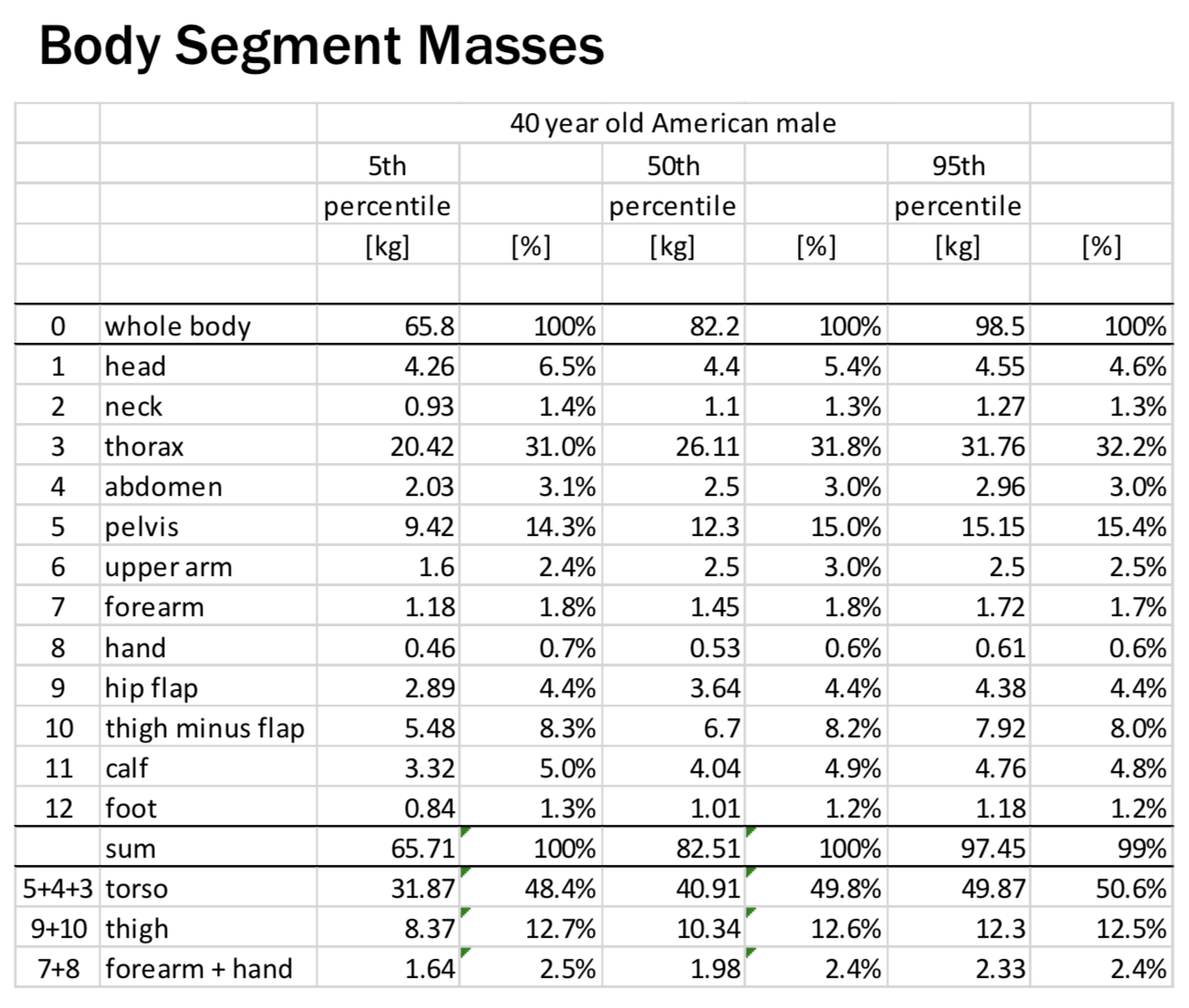
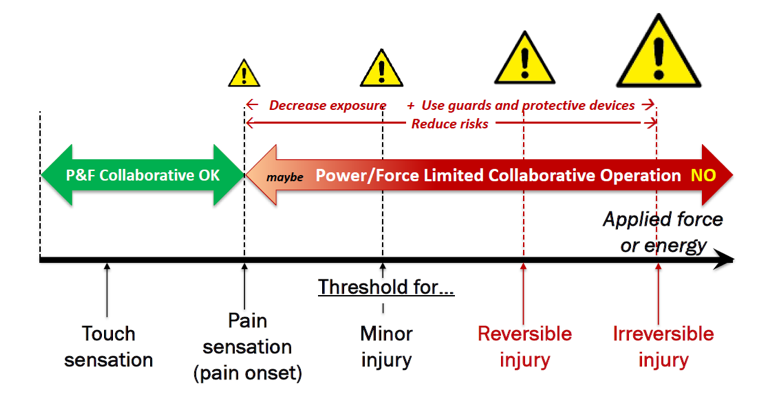
Конечная конфигурация – это баланс между безопасностью и производительностью.
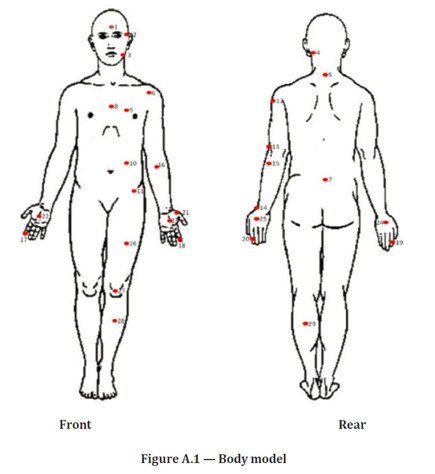
Техническая спецификация ISO/TS 15066 включает в себя таблицу, разработанную по результатам исследования болевого порога Университетом Майнца, в которой представлен список уровней силы и давления для проектирования усилий робота (исследовался болевой порог 100 людей в 29 болевых точках).
Источник: ISO/TS 15066:2016, Fig. 4, Fig A.1
Источник: ISO/TS 15066:2016.
Источник: R. Nelson Shea, NRSC 2016 Presentation. Used with permission
Помните: безопасность – это отсутствие травм.
Часть 2. История коботов
Первого кобота разработали в 1996 году J. Edward Colgate и Michael Peshkin из Northwestern University (США). Для сравнения, обычных промышленных роботов к этому времени производили уже более 30 лет. Однако термин «кобот» придумал в результате конкурса на лучшее название другой человек из того же университета — Brent Gillespie. Термин так понравился журналу Wall Street Journal, что они включили его в список Words of Tomorrow и дали приз в 50$
Первый патент, относящийся к коботам был зарегистрирован в США в феврале 1996 года (US 5,923,129), а патент, использующий сам термин «кобот», в октябре 1997 (US 5,952,796).
Фото первых коботов можно посмотреть здесь
Разработку коботов в Northwestern University поддержали корпоративные фонды General Motors и Ford, а также национальный научный фонд США. В том же 1996 году ученые основали компанию Cobotics (в 2002 году ее поглотила Stanley Assembly Technologies).
Нынешнюю популярность коботы получили благодаря появлению компании Universal Robots (Дания) в 2005 году. Идея дешевого и простого в настройке и эксплуатации робота (по сравнению с промышленным) пришла основателям еще в 2003 году. Сделав несколько прототипов, в 2008 году компания выпустила первый серийный образец робота UR5 (самый популярный на сегодняшний день) и получила инвестиции от датского правительства. В 2012 году компания выпустила второго робота (UR10), а в 2015 была приобретена американской Teradyne за $285 млн.
Именно после успеха Universal Robots коботов начали делать корпорации, которые давно и успешно занимали рынок промышленных роботов (FANUC, ABB, KUKA, BOSCH и другие), а также стали появляться похожие стартапы: Rethink Robotics, Doosan Robotics, Techman Robot. Среди молодых проектов есть и выходцы из стран СНГ – белорусский стартап Rozum Robotics.
Часть 3. Где и как используются коботы
Сколько коботов в мире? Несмотря на растущую популярность коботов, они еще не выделены в отдельный класс в ежегодном исследовании World Robotics, которое проводит главный источник данных в отрасли Международная Федерация Робототехники (IFR).
В мире сейчас используется около 2 млн штук промышленных роботов (прогноз IFR на 2017 год). Сколько из них – коллаборативных точно неизвестно. Есть оценка Barclays research, согласно которой в 2017 году в эксплуатации находилось 32 тысячи коботов, подавляющее большинство из которых произведены Universal Robots.
Еще несколько лет назад коботы считались исключительно лабораторным оборудованием, которому нет места на производстве, однако возможность гибкой настройки и минимальные издержки на интеграцию позволили преодолеть психологический барьер. Сейчас роботы этого класса находят применение в легкой, пищевой промышленности и даже в автомобильной индустрии традиционно занятой классическими роботами.
Barclays Research оценивает рынок в 2017 году в $800 млн. Есть сведения, что до трети коботов продается в Китае. Рынок промышленных роботов в 2017 году IFR оценила в $13,1 млрд.
Прогноз на будущие годы:
IFR прогнозирует общий размер рынка промышленных роботов к 2020 году в $23,2 млрд. Если сопоставить оценки Barclays и IFR, получится заметный рост доли коботов в общей сумме: с 6,1% в 2017 до 13,5% в 2020 – довольно динамично.
Что умеют делать коботы:
- «Pick & Place»: погрузка разгрузка конвейерной ленты.
- Загрузка/выгрузка заготовок в станки.
- Тестирование и сортировка деталей: проверка или сортировка случайных объектов на конвейере в рамках контроля качества или других потребностей.
- Упаковка: сбор и размещение предметов в контейнеры для транспортировки или хранения.
- Легкая сборка: сборка электроники и бытовой техники.
- Финишные операции: удаление излишков пластмассы или металла из деталей.
Драйверы роста коботов в ближайшие годы:
1. Коботы дешевле обычных промышленных роботов (~$25 тысяч вместо ~$50) -> снижается порог входа для малого и среднего бизнеса (МСБ).
2. Коботы проще в настройке: не обязательно уметь программировать. После одного дня обучения рабочий сможет настроить робота для выполнения задач средней сложности. Можете попробовать сами. То есть, не нужно нанимать сервисных инженеров или системных интеграторов -> снова снижается порог входа для МСБ.
3. Коботов проще перемещать: они легче, чем промышленные, им не нужна локальная инфраструктура в виде клетки -> привлекательность для МСБ повышается, так как можно быстро переналадить производство.
4. Повышение стоимости ручного труда из-за старения населения и уменьшения числа трудоспособных людей (ставка рабочего в час: €40 в Германии, €12 в США, €11 в восточной Европе и €9 в Китае. Стоимость работы кобота $6/час).
5. «Решоринг» синергия предыдущих факторов приводит к тому, что США и ЕС возвращают производство из Китая к себе на родину. Это может способствовать сокращению расходов на морскую логистику и повышению качества продукции.
6. Государственные программы, направленные на автоматизацию и роботизацию производства. Они могут стимулировать и поддерживать (в том числе финансово) приобретение и использование роботов:
— «Industry 4.0» в Германии;
— «Made in China 2025» в Китае;
— «National robotics initiative 2.0» в США.
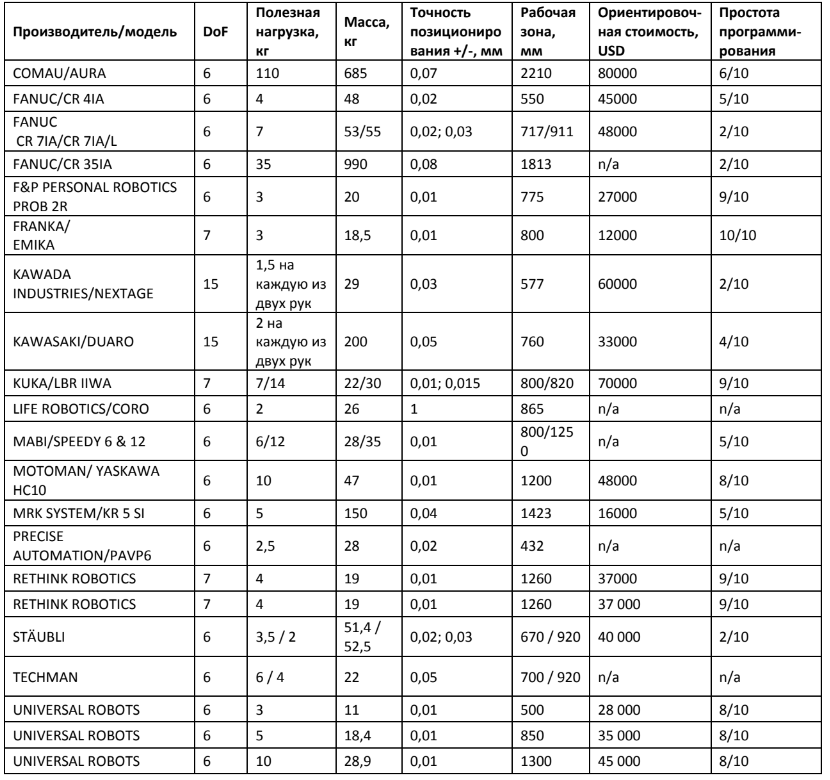
Часть 4. Кто производит коботов
Скачать таблицу
Часть 5. Как на коботах можно заработать и как их использовать для решения своих задач
Как заработать на коботах:
- Заниматься промышленной интеграцией – помогать компаниям выбрать и настроить кобота. Сейчаc в России достаточно конкурентный и низкомаржинальный бизнес. Однако есть потенциал для роста.
- Заниматься сервисным обслуживанием: ремонтом и профилактикой). Обычно идет как дополнительная опция к интеграции, но может существовать отдельно.
- Разрабатывать нишевые решения на основе кобота, например, делать готовые решения на базе коботов. Или выкладывать код в магазин приложений и получать деньги.
- Разработать своего кобота и подать заявку в корпоративный акселератор Сбербанка до 15 июля 2018.
Для использования коботов при решении своих задач необходимо определить потенциальные процессы (задачи) для автоматизации. Идеальными для первой автоматизации будут повторяющиеся задачи с высокой долей определенности (предсказуемые).
| |
Просто автоматизировать |
Сложно автоматизировать |
| Задачи |
Перемещение предметов, следование траектории без усилия или с постоянным усилием |
Контроль усилия, например, полировка или точная сборка |
| Предметы |
Небольшое разнообразие предметов (размеры, масса, материал), известные и обычные формы (цилиндр, параллелепипед) |
Большое разнообразие предметов, сложные формы, деформирующиеся и хрупкие предметы |
| Расстановка предметов |
Предметы ровно уложены: в коробку, стопку или на паллете |
Предметы свалены в коробку/корзину или двигаются на быстром конвейере |
| Интеграция с другим оборудованием |
Использование интерфейсов, которые использует человек: кнопки, ручки |
Подключение и настройка датчиков, программная интеграция со станками |
| Программирование |
Повторяющиеся движения в одной последовательности (без условий и деревьев) |
Сложная логика и множество условий в зависимости от информации с датчиков |
Здесь можно рассчитать ROI вашего проекта по роботизации
В статье использован перевод следующих публикаций:
- Carole Franklin – «Overview ISO/TS 15066:2016»
- Roberta Nelson Shea – «ISO/TS 15066 Introduction»
- Bjoern Matthias – «Collaborative robots Power and Force Limiting»
- blog.robotiq.com/what-does-collaborative-robot-mean
- Robotiq – «Cobot eBook», «Getting started with collaborative robots», «ISO/TS 15066 Explained»
Текст подготовили Альберт Ефимов и Денис Затягов из Лаборатории робототехники Сбербанка
