Comments 120
Расскажите подробнее про магнитную систему вашего двигателя. Как рассчитывали геометрию пластин статора. Использовали ли какое либо предварительное моделирование магнитных полей?
В планах у нас стоит задача по освоению программного комплекса по моделированию BLDC моторов. Но он пока для нас слишком сложный, поскольку у нас в команде специальность у всех немного другая. У меня, например, криоэлектроника.) Также в нём требуются точно знать магнитные параметры материала статора и магнитов, что тоже узнать не так просто.
Лучше увеличьте число полюсов. Чем больше полюсов, тем ниже скорость и выше момент при той же мощности. На машинках нет особого профита от сверхоборотов. Зачем вам 20к оборотов то… Прямой привод не сделать, а редуктор будет быстро изнашиваться. Для ориентира посмотрите сколько полюсов делают китайцы и какие обороты имеют эти моторчики.
Это вам к электроприводчикам, в МГОУ, кафедра электропривода:
https://vk.com/club86813336
По моему здорово) Такой вопрос, а какая цель данного изделия — серийное производство, или как предположили выше, дипломный проект? Не делали прикидок, сколько может стоить такой девайс при серийном выпуске в нашей стране?
а единичный во сколько оцениваете?
Согласен, с Китаем по цене бороться очень тяжело, даже Apple на это дело плюнули, а вот качество и параметры это как раз тема. Китайские движки та еще лотерея, бывают норм, а бывают с таким жутким браком… Я считаю, что просто необходимо иметь свое производство таких изделий, тем более это не требует чрезмерно дорогого оборудования и редких элементов. В общем удачи вам и держите общественность в курсе)
Спасибо за подсказку по питанию. Пока с датчиком проблем не было, он показывал тоже, что и лабораторный ИП, но я тоже боялся за наводки. Часто на эти датчики за это жалуются.
Естественно такой мотор был не способен выдать максимальную мощность. Однако этого хватило, что бы мотор раскрутился до 20к rpm, после чего пластик не выдержал и ротор мотора разорвало, а магниты раскидало вокруг.
Никому кисть руки не повредило? (шутка)
Я напарнику оторвал ноготь так. Допустил ошибку в коде и начал заливать в подключнный контроллер, а друг как раз монтировал BLDC на платформу. В результате двигатель очень резко стартанулся и разнёс всю платформу.
Я сидел спиной и не видел как всё произошло, услышал только звук и летящие по всей лаборатории куски текстолита и оргстекла. Поварачиваюсь, а товарищ поливает пол кровью.
Залили мы тогда это всё алкоголем с горя (месяц труда насмарку), но урок для ТБ я выучил на всю жизнь. По крайней мере больше не доверяю ни своему коду ни чьему либо чужому и стараюсь максимально обезопасить устройство примитивными механическими средствами.
Поищите методичку по балансировке в инете для быстрого входа в вопрос.
Для студентов мехфака лабораторная на готовом стенде занимает максимум час. А сам стенд можно найти у добрых людей в институте.
Отбалансировать, действительно, много кто поможет. Это операция сильно поможет Вам для сглаживания пульсаций момента (тем более обороты 20к, и всего 2 полюса, если я правильно понял описание).
Сильный магнит — это какой? понятно, что неодим, а коэрцитивная сила какая? где брали?
Какая сталь использовалась? изотропная или анизотропная?
Кстати, СИЛЬНО лакировать не надо (чем меньше зазор диэлектрика между пластинами, тем больше коэффициент заполнения и, соответственно, КПД). Да и вообще, электротехническая сталь продается уже ламинированная. И после лазера с покрытием ничего не становится.
Статор потом лучше отдельно пропитать в лаке/компаунде, во избежание пробоев изоляции.
Насчёт стали не скажу, не знаю просто. Нам в институте отдали старые остатки листов по 0.5мм, которые для трансформаторов были предназначены. Они были без какого либо покрытия.
Но все, конечно, надо считать по экономической стороне. Мы тоже перешли с 0,27 на 0,35 сталь — меньше резов, быстрее сборка.
Стали в РФ — 3412/2412 по ГОСТ 21427.1/21427.2 Анизотропная и изотропная соответственно.
Лучше брать анизотропную, но она дороже. С изотропной придется «повозиться» — нужно обеспечить переворот статорных пластин на 180 градусов через одну.
Еще посмотрите вот сюда: http://cogent-power.com/downloads
тут и каталоги с применением и даташиты на сталь.
Эта сталь очень хороша, используем ее уже 5-6 лет (No27 и M250-35).
PS: вопрос чисто из любопытства, я вообще экономист ;)
Оптические датчики выигрывают тогда, когда нужно не просто обороты считать, а ещё более точно нужно угол определять. Тогда ставится кружок с кучей прорезей и оптический датчик может срабатывать каждые 5 градусов, например.
у нас так на балансировочном станке считаются обороты (клеится самоклеющаяся полоска), правда он до 6к оборотов рассчитан.
Вообще, для продакшна перспективнее использовать BEMF (обратная ЭДС). Не требует наличия специальных датчиков, что делает себестоимость одного устройства значительно дешевле. С другой стороны — требует более качественной схемотехники и программного кода контроллера, что делает разработку чуть дороже.
С точки зрения коммерциализации нужно идти в ту сторону, где массовое производство хуже по каким-либо причинам, тогда вы выиграете у китайцев. Это:
1) Крупногабаритные изделия (бьете их в логистике + стоимость ручной сборки крупного и мелкого сходная, а вот прайс разный).
2) Качество материалов в т.ч. стали, подшипники и т.д.
3) Кастом под заказчика
С точки зрения потребителя, обычно ощущается недостаток в тяговитых низкооборотистых моторах. Очень мощно сейчас прет тема мотор-колес для малогабаритного транспорта (находятся по ключевику «мотор-колесо велосипед»)
PS Используйте защиту, болванка в 1 кг, слетающая со шпенделя в 3к RPM пробивает 0.5см стали. Высокие обороты это не шутки.
Этот мотор без датчиков и положение определяется по напряжению от самоиндукции на свободной фазе. Также планируется добавить в него датчики Холла т.к. этот мотор предназначен для радиоуправляемых машинок. Им нужно, что бы мотор хорошо работал на низких оборотах, когда самоиндукции недостаточно.
Такой мотор мы выбрали по опросу в VK у моделистов. Он нам показался наиболее востребованным.
Я на днях такой заказывал на 3100kV.
https://ru.aliexpress.com/item/Racerstar-3650-Sensorless-Brushless-Waterproof-Motor-60A-ESC-Set-For-1-10-Monster-1-10-Truck/32673864325.html?detailNewVersion=&categoryId=200001407
Для нас сейчас это интересное хобби. И у нас цель сделать свой мотор лучше аналогов по характеристикам.
>что в вашем проекте нового?
У нас своя конструкция мотора, она может быть чуть лучше/хуже аналогов. Мы делаем полный замер характеристик мотора, остальные производители характеристик практически не дают
А с творчеством сего Уважаемого моделиста знакомы? http://www.hivoltmotors.ru/
Ещё мы находили магниты такой формы из самарий кобальта, у них критическая точка 300 градусов. Но они слабее.
Также мы делали составные роторы из нескольких маленьких магнитов в виде блоков. Тут уже выбор большой и можно любой тип магнита найти.
Про этого моделиста раньше не слышали, сейчас ознакамливаемся)
Ребят, вы делаете хорошую работу, тем более на уровне универа. Но! Вы ниже рассуждаете про сертификации и пр. но, без обид, при этом не знаете мат.часть. Мой совет — начните с ГОСТов — для начала 2582 машины электрические вращающиеся. Там будет очень много ответов, в частности про испытания и допустимые уровни параметров электродвигателей. А уж в нем очень много ссылок на другие госты осты и стандарты.
Он получается тяжелее при той же мощности.
Также у него там намотка хитрая(суперпозиция звезды и треугольника). Это хорошо, но мне кажется лучше просто фаз делать не 3, а больше.
Мы используем лак для плат т.к. он хороший изолятор и более менее держит нагрев. Насчёт окиси не знаю.
это вырубка из листа, снятие заусенок — правка, вакуумный отжиг, фосфатирование, склейка пакета клеем бфрк или аналогичным в печи, очистка, фаски, окраска порошковой эмалью. всё вполне себе на потоке можно в гараже сделать. и будет приличного качества статор по цене ниже китайского (особенно если делать не в городах-миллионниках, а где-то там, где зп 10 тыщ)
про серию видимо невнимательно пропустил
1) вырубка/вырезка из электротехнической стали (на хороших штампах заусенец не более 0,02 мм для стали 0,35 мм)
2) сборка в пакеты на приспособлении, калибровка/наборка по весу/толщине
3) сварка по спец пазам на внешнем диаметре (можно и клеить, и есть даже фирма Кинлешписс, которая в одной линии от листа/бобины выдает уже склеенные статора), но более технологичен метод пуклевок
4) намотка
5) коммутация + пропитка
в чём странность?
слабо себе представляю получение такого статора вашим способом
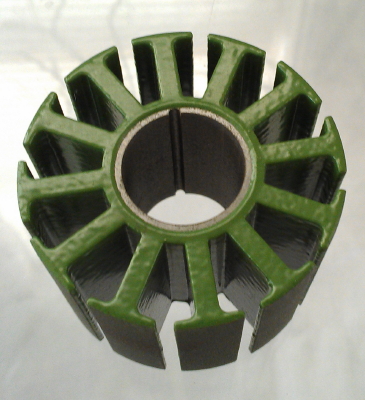
По поводу отжига, фосфотирования и пр. Сейчас никто не использует непокрытую сталь! Наоборот, производители стали придумывают все новые покрытия для облегчения склейки и/или вырубки. Самый распространенный метод для сборки сердечника — пуклевание. Потом — сварка по шву. Да как минимум — русэлпром! Можете им написать!
Плюс покраска сердечника вообще вызывает несколько вопросов:
1) для чего? В чем смысл? Изоляция?
2) краска ухудшает теплоотвод
3) краска не так устойчива к температурам, как лак или компаунд
И судя по количеству лишних мех. операций — тех процессу лет 40, когда штампы не могли 6-7 квалитет
1. для облегчения намотки без повреждения лака провода. особенно актуально для мелких BLDC, когда провод не укладывается в пазы, а продевается продольно.
2. Толщина слоя краски 0,2-0.4мм. ухудшаемость теплопередачи на уровне погрешности.
3. (данная) краска выдерживает 200 С. Эпоксидная порошковая.
чего это вы так завелись? я описал типичный процесс для изготовления малогабаритных статоров, к примеру резольверов и тд. По нему действительно работают. Вы не поверите — некоторые предприятия работают на станках и техпроцессе 40-летней давности и это нормально :)
Ткнете ссылкой — где их красят?
Я «завелся» из-за вот этой фразы:
Есть стандартный способ склейки статоров., т.к. это уже давно не стандарт, а атавизм, т.к. присутствует много лишних и дорогих операций, вместо использования правильных материалов.
Для избежания повреждения лака провода, в статор вставляют синтофлекс, он же и изолятор хороший. Или пластиковые торцевые изоляторы.
П.с. если не сложно, ткните ссылкой в производителей по вашему тех процессу —
готов заказать.
P.S. а у вас, может сайт есть или еще какой-то способ связи, т.к. моторы на заказ действительно интересны.

http://www.westknoxrc.com/index.php?topic=625.0
И разгоняться до невообразимых скоростей
Не забывайте про балансировку. Без нее ваше изделие развалится не проработав и 100 часов. Только динамическая балансировка, желательно на высоких оборотах. Подшипники тоже важный элемент. 20000 об\мин это не мало и стоит задуматься о качественных подшипниках и правильной посадке. Лайфхак: если с балансировкой туго, ставим подшипники на «мягкую» опору. Пример как это сделано — простые модели граверов Dremel, Proxxon.
Кстати, как тут не вспомнить этих ребят. Им как раз нужен компактный сравнительно высокооборотный мотор.
Зная эти данные можно подобрать число витков под нужные kV или ток. Что бы поднять kV в 2 раза нужно сделать в 2 раза меньше витков и взять провод в корень из 2 раз толще, потребляемый ток при этом увеличится в 4 раза.
Эт сколько витков на катушку у вас получилось? 0.6мм всё-таки относительно толстый провод
А мотали как, руками? Для серийных-то руками не больно помотаешь…
Для такого мотора 0.6 толстый провод, таким проводом получилось 23 витка. У аналогов 17 считаеся максимальным количеством.
Мотали руками. Тут намотка внутренняя и это очень муторно. Но китайцы на производстве тоже руками мотают https://www.youtube.com/watch?v=hMCyqyyh5MA&feature=youtu.be
А где бы ещё чё-нить прочитать про количество катушек и магнитную систему?
http://www.avislab.com/blog/brushless02/
На сайте одного украинского чувака есть удобная таблица по оптимальным числам обмоток и магнитов
http://www.en.net.ua/diaz/emotor/files/bldc-scheme.zip
Мощность уходящая в тепло на проводе Q=I^2*R. На полезную работу угодит мощность W=I*B*dl*w(сила Ампера*скорость вращения). КПД = W/(W+Q)~=I/(I+I^2). Т.е. при I->0 КПД->1
Для такого мотора 0.6 толстый провод, таким проводом получилось 23 витка. У аналогов 17 считаеся максимальным количеством.
Мотали руками. Тут намотка внутренняя и это очень муторно. Но китайцы на производстве тоже руками мотают https://www.youtube.com/watch?v=hMCyqyyh5MA&feature=youtu.be
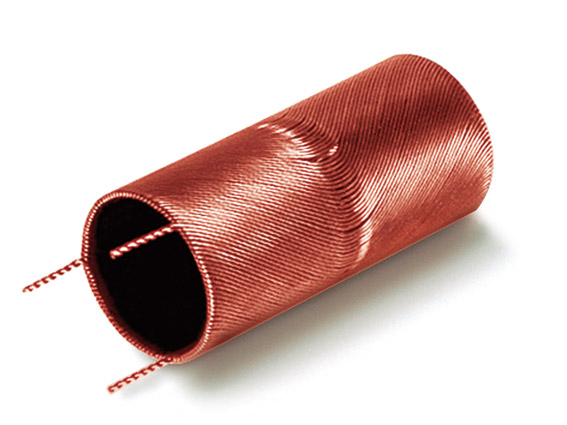
Ещё совет — обратите внимание на такой эффект как «магнитная поляризация» магнитопровода статора — когда для «проворачивания» ротора нужно сначала нейтрализовать намагниченность статора, вызванную собственно магнитами ротора. на эту самую «нейтрализацию» тратится энергия, КПД падает. именно поэтому придумали «безслотовые»(а потом и безжелезные) двигатели.
К слову — «безжелезные»(Ironless) моторы имеют самый высокий КПД(до 98%!).
Пример такой «обмотки»:
А вот пример «большого» безжелезного инранера:

Да, для своих размеров мощность у него ниже, чем у его «железных» собратьев, но за счёт КПД выигрыш таки перевешивает.
К слову о «птичках»:
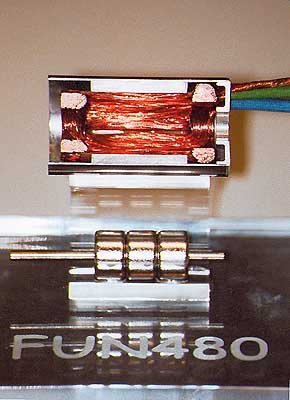

480-й «фан» — чуть меньше 540-го, но всётаки. характеристики можно найти в сети — сможете «обойти» — честь будет вам, и хвала. нет — ну. с кем не бывает :D
И вообще: http://www.cityfujisawa.ne.jp/~iijima-p/BRASHIlin.htm — очень интересная страничка одного японского «конструктора». гугл-переводчик поможет вам понять суть, а картинки дополнят общую картину «происходящего» ;)
КПД у него выше, однако с их серийным производством не все так просто.
Кроме того, медная обмотка заливается смолой, что затрудняет отвод тепла, а сама смола при циклах нагрев-охлаждение со временем «стареет».
Тем не менее планируем сделать опытный slotless мотор для долговременных испытаний.
Алексей, Motochrome.
Создание и тестирование бесколлекторного мотора