As Intel's Threading Building Blocks (TBB) library is being refreshed using the new C++ standard, deprecating tbb::task interface, the need for a high-level tasking interface becomes more obvious. In this article, I’m proposing another way of defining how a high-level parallel task programming model can look like in modern C++. I created it in 2014 as my last contribution to TBB project as a core developer after 9 wonderful years of working there. However, this proposal has not been used in production yet, so a new discussion might help it to be finally adopted.
Motivation
According to customer feedback, the nested blocking programming model used in TBB can cause deadlocks if a program uses parallel algorithms with locks in user functions. It can be worked-around using tbb::task_arena by preventing work mixing but it is not an efficient approach. And there is no good way to solve the latency problem: one outermost task can get stuck until another outermost task of a high-level algorithm completes. It can be approached in different ways, e.g. using stack-switching (co-routines), just replacing a blocked thread by a new one, or preventing the task stealing using tbb::this_task_arena::isolate(). This article explores a purely semantical way out of these issues. It avoids the burden of additional restrictions, complexity, or resources in the scheduler since at low-level, it is all still possible via the deprecated tbb::task interface.
Design forces
Main idea
A solution for the nested blocking issue requires interrupting the current execution scope either by switching to a new stack/thread (scheduler way) or by terminating and splitting the scope into parts running as a sequence of continuations (semantical way). The latter leads to additional complexity of dealing with variables which go out of scope, e.g. consider this example with blocking style:
int result = parallel_reduce(...);
post_process(result);If we want parallel_reduce not to block, we need to split this into two tasks (by lines) with separate scopes. But how to deal with the `result` then? The concept of `future` seems to be the closest approach to this and C++11 provides std::async(), which returns std::future as a result of the user's functor:
future<int> result = std::async(parallel_reduce, ...);
std::async(post_process, result);Now, how to connect the tasks into as a sequence? std::future is blocking. However, this example demonstrates that the most native way to express dependencies is to follow the function arguments: the second task waits for the result of the first one. We just need to extend ideas of std::future and std::async to cover our needs.
Meanwhile, let's consider the weakness of C++11 async constructs using the following example:
std::future<int> Fib(int n) {
// error: no implicit conversion
if(n < 2) return n;
// error: no conversion from 'std::future<std::future<int> >' to 'std::future<int>’
std::future<int> &&left = async(Fib, n-1);
std::future<int> &&right = async(Fib, n-2);
return async([](std::future<int> &&l, std::future<int> &&r) -> int {
return l.get() + r.get(); // it blocks
}, std::move(left), std::move(right));
} In order to support recursions like this for continuation-style tasking, we need to:
- directly initialize a 'future' variable by a value (optionally)
- collapse template recursion of a 'future' variables
- build task dependencies based on 'future' arguments instead of blocking
- unpack 'future' types into plain types before calling user functor
The result can be as beautiful and concise as the following:
oox_var<int> Fib(int n) {
if(n < 2) return n;
return oox_run(std::plus<int>(), oox_run(Fib, n-1), oox_run(Fib, n-2) );
}Where:
oox_var<T> - represents a new form of a future variable
oox_var<T> oox_run(Func, Args...) - spawns a task when arguments are ready and returns `oox_var` as a promise to provide the result of Func in future. If there are `oox_var` arguments which are not ready (i.e. “promises” themselves), it makes a continuation task, which depends on completion of pending `oox_var` arguments.
All these requires tasking with multi-continuations and dynamic dependencies just as in the initial OOX (Out of Order eXecution) proposal by Arch Robison. Thus the `oox_` prefix and the second version. [Update 24-Sep-21] Now, OOX officially stands for Out-of-Order Executor.
Static Dependencies
OOX implementation enables automatic deduction for write-after-write ("output"), write-after-read ("anti"), and read-after-write ("flow") dependencies. This new interface approach provides a way to enumerate all the prerequisites in arguments and identify their properties such as:
read-write - l-value reference &
final-write - r-value reference &&
read-only - const reference &, value
copy-only - value
Thus, each oox_run task knows which oox_var can be modified, which has only to be read, and which can be just copied thus unlocking more potential parallelism with write-after-read dependent tasks. It allows building a complete task dependency graph without additional specifications beyond the oox_run() arguments for the case of a fixed number of tasks since the number of arguments is a compile-time decision:
oox_var<T> a, b, c;
oox_run( [](T&A) { A=f(); }, a);
oox_run( [](T&B) { B=g(); }, b);
oox_run( [](T&C) { C=h(); }, c);
oox_run( [](T&A, T B) { A+=B; }, a, b);
oox_run( [](T&B, T C) { B+=C; }, b, c);
oox_wait_for_all(b); // this thread joins computation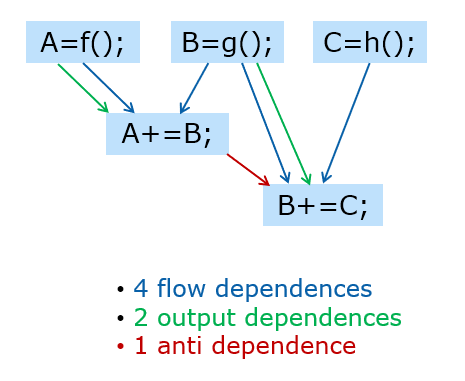
To sum up, there are two big design ideas behind OOX 2.0:
1. Abstract user functor from task dependencies
2. Reuse functor argument types for task dependency types specification
Users make their best effort to specify the minimally necessary access types and OOX extracts as much parallelism as possible in response.
Function and arguments types match
There are two options for passing arguments to oox_run and receiving them in the user functor.
Match oox_run arguments to functor arguments. It means if the functor receives by lv-reference, it will be stored as a reference and it will be the user's responsibility for the lifetime of the referred object. However, if the functor receives by const-reference, a choice must be made: to copy the argument or to keep as a reference. If passed to oox_run as rv-reference, it must be a copy.
The standard uses a different way. You can choose to pass by reference and take responsibility for the object over its lifetime, but it has to be done explicitly via std::ref(), std::cref(), and std::reference_wrapper<>. Otherwise everything is passed by a value.
Since the semantics of oox_run arises from similarity with std::async and std::thread, it looks natural to assume the same rules for argument passing in case they are not oox_var, i.e. cplusplus.com says the following:
Their types shall be move-constructible. If Fn is a member pointer, the first argument shall be an object for which that member is defined (or a reference, or a pointer to it). The function uses decay copies of these arguments. Fn and Args... are template parameters: if implicitly deduced, these are the proper lvalue or rvalue reference types of the arguments. Note though, that the function uses decay copies of fn and args... (see std::ref for a wrapper class that makes references copyable).
Now, what to do with oox_var<> arguments? They differ from plain types because they guarantee lifetime and access synchronization. Following the same logic of unification and taking into account that access to oox_var<> content is synchronized by the dependency graph build by oox_run(), we can claim that arguments referred as oox_var<> are always stored by reference. It does not make much sense to always store arguments by value, since it kills half of use cases where oox_var<> is used as a synchronization point when a writer waits for readers. On the other hand, when a user functor takes an argument by value, it is not visible to the user whether a task stores it by value or by reference to the oox_var storage. The former enables task graph optimization opportunity when the producer can copy the argument to the consumer task and proceed to the next write immediately, without depending upon finishing of the consumer task. See note //1 below.
But when an oox_var argument is stored and passed by lv-reference, a visible difference with a plain type can arise for oox_var<> passed by r-value reference: oox_run(f, move(my_var));It can prevent the optimization for functors f(T) and f(T&&) which works fine for non-oox types. Thus, arguments passed as oox_var&& have to be moved into the user functor instead of just passing as lv-reference as for other cases. See note //2 below.
The following table summarizes the observations above and couples it with dependency arcs types formed for the task graph as explained below (please note that this complexity is for the implementation writer rather than the user):
Stage | oox arg \ functor arg: | f(T) | f(T&) | f(const T&) | f(T&&) |
pack | var<A> &a | A s(*a.p) //1 | A& r(*a.p) | A& r(*a.p) | A s(*a.p) //2 |
arc | var<A> &a | copy-only //1 | read-write | read-only | copy-only //2 |
use | var<A> &a | f(move(s)) //1 | f(r) | f((constA&)r) | f(move(s)) //2 |
pack | const var<A> &a | A s(*a.p) //1 | #Error | A& r(*a.p) | A s(*a.p) //2 |
arc | const var<A> &a | copy-only //1 | #Error | read-only | copy-only //2 |
use | const var<A> &a | f(move(s)) //1 | #Error | f((constA&)r) | f(move(s)) //2 |
pack | var<A> &&a | A& r(*a.p) | #Error | A& r(*a.p) | A& r(*a.p) |
arc | var<A> &&a | final-write | #Error | final-write | final-write |
use | var<A> &&a | f(move(r)) //3 | #Error | f(move(r)) //3 | f(move(r)) //3 |
1. True for a copy-optimized implementation, in a read-only version, it is just the same as for const ref.
2. True for a copy-optimized implementation, in a read-only version, it is f(A(*a.p)).
3. The lifetime of oox_var is over and its stored value can be moved in order to repeat plain type behavior.
read-write - the value is exclusively owned by a single producer task which can modify it. It unlocks all the pending shared consumers to be scheduled for execution.
final-write - there are no consumers or next producers for this read-write task - useful for optimizations.
read-only - the value can be simultaneously shared between concurrent tasks which start after the producer task finishes and which prevent the next producer from being executed until all consumers finish.
copy-only - producer copies the value to this consumer and does not depend upon its completion.
Consistency
One of the basic design principles for oox_var is that its usage should be implicit/transparent for the user functor perhaps following std::reference_wrapper<> notation. It is also motivated by recursive algorithms where oox_run for the same functor can take oox_var to build a dependency graph or direct parameter on the leaf nodes. It is seamless for a functor taking by value (T) or by rv-reference (T&&):
// setup
void f(int by_value, string && by_rv_reference);
// for plain types
int i = 0; const int &j = i; string s = "plain";
oox_run(f, 1, string("temporary"));
oox_run(f, i, s); oox_run(f, j, move(s));
// for oox variables
oox_var<int> oi = 0; oox_var<string> os = string("managed");
oox_run(f, oi, move(os));As for const-reference (const T& and lv-reference (T&), the std::reference_wrapper<>has to be used for plain types, and oox_var<> looks like a similar concept. This similarity also asks for std::ref-like function, which makes oox_var<> for the given variable. Unlike std::refwhere a user assumes the lifetime responsibility, 'oox_ref' has to either copy or move the content. The idea is to take a variable by its name (without a type) and detach it from current scope prolonging its lifetime. E.g.:
// setup
void f(int & by_ref, const string & by_cref);
int i = 0; const int &j = i; string s = "plain";
// for plain types
auto ri = std::ref(i); auto crs = std::cref(s);
oox_run(f, ri, crs);
// for oox_vars
auto oi = oox_make_copy(i); auto os = oox_make_move(s);
oox_run(f, oi, os);Stored types
Following the same rules described above (oox tasks store plain types by value and oox_var usage has to be indifferent from plain type), it is easy to come to the following type storage rule:
1. oox_run() return oox_var<> for decay type of functor return type, copy- or move-initialized.
2. oox_var<> doesn't store references. Use reference_wrapper or pointer types instead.
3. Although, oox_var<T> could have special meaning of non-modifiable storage shared between tasks, it basically becomes a form of shared_ptr and its design value is not clear.
4. Don't compile oox_var<T>if not is_same<T, std::decay<T>::type>
Dynamic Dependencies
The simplest approach to a dynamic number of tasks is to build a chain of small tasks, which are also dependent upon bigger parallel tasks:
oox_var<size_t> disk_usage(INode& node) {
if (node.is_file())
return node.size();
oox_var<size_t> sum = 0;
for (auto &subnode : node)
oox_run([](size_t &sm, // serialized on write operation
size_t sz) {
sm += sz;
}, sum,
oox_run(disk_usage, std::ref(subnode))); // parallel recursive leaves
return sum;
}It also enables linearization and deterministic reduction.
If such a serialization is not an option, anti-dependence trick can be used:
oox_var<size_t> disk_usage(INode& node) {
if (node.is_file())
return node.size();
typedef tbb::concurrent_vector<size_t> cv_t;
typedef cv_t *cv_ptr_t;
oox_var<cv_ptr_t> resv = new cv_t;
for (auto &subnode : node)
oox_run([](const cv_ptr_t &v, // make it read-only (not copyable) and thus parallel
size_t s){ v->push_back(s); },
resv, oox_run(disk_usage, std::ref(subnode)));
return oox_run([](cv_ptr_t &v) { // make it read-write to induce anti-dependence
// from the above read-only tasks
size_t res = std::accumulate(v->begin(), v->end(), 0);
delete v; v = nullptr; // release memory, reset the pointer
return res;
}, resv);
}This might be enough for a minimal set of OOX features. Though, additional extensions might be helpful to improve the usability of this case:
oox_var_ptr<T> - same as oox_var<T*>but disables copy-and-release optimization
oox_node - base of oox_var or same as oox_var<void>
oox_node oox_join(oox_node... begin)
oox_node oox_join(Iter<oox_node> begin, Iter<oox_node> end) - joins a collection of oox_vars into flow-dependent oox node
oox_var<> oox_run(oox_node, Func, args...) - same as simple oox_run(Func, args...)but additionally flow-dependent upon the oox_node.
Integration with parallel algorithms
Now, when the problem of passing results between continuation tasks is solved, let's return to the nested blocking issue. This is how to avoid it:
tbb::parallel_for(0, N, [](int i)->auto {
mutex.lock();
oox_node dep = parallel_for(0, M, Body);
return oox_run(dep, []{ // runs possibly on
mutex.unlock(); // different thread
});
});And this is how to avoid the performance implication issues:
tbb::parallel_for(0, N, [](int i)->auto {
oox_node dep = parallel_for(0, M, Body1);
return oox_run(dep, []()->oox_node {
return parallel_for(0, M, Body2);
});
});This is enabled by the following rules and constructs:
sync_var<T> - contains root_task of an algorithm. Source-compatibility with TBB needs semantics opposite to oox_var:
- wait_for_all() in destructor :-(
- operator T(): implicitly waits for the value
private constructors: not user-manageable.
oox_var<T>(sync_var<T>&&) - converts algorithms into OOX nodes
sync_var<void> parallel_for()
sync_var<T> parallel_reduce() - Every blocking algorithm can return sync_var. If user functor returns oox_var, embed it into task tree as a continuation.
Note that it is impossible to implement `oox_run(parallel_for, 0, M, Body)` form because overload resolution cannot be used for functor type deduction.
Storage Considerations
Since oox_var<> is passed between tasks and can go out of scope before a task finishes working with its value, it needs a separate storage. I.e. oox_var<> is always a pointer. And there are two ways to implement it:
separate storage
It's straightforward but it requires additional allocation in oox_run() returning an oox_var. Besides, it becomes too close to notion of shared_ptr and probably should be better integrated with it.
embed into writing task
Each writing task moves the var inside itself from the previous location before modification and keeps it while someone references it. This reduces the number of allocations for oox_run() with a return value but
requires a move or copy constructor for the user type and gives no guarantee of the same location for stored variable.
embed into initiating task
A task executing oox_run functor contains a storage for its return value. But it keeps the whole task object, which has produced this value, allocated.
There are more tricks and variations for how to optimize storage and execution of oox tasks, e.g. use NRVO+TLS trick to pass hidden execution context, introduce async_var for building more optimized graph of tasks thanks to deferred parallelism, etc.. but this article is long enough already, so, let's stop here.
Instead of conclusion [update: 5 Oct 21]
If you like the idea and have some spare time, please join discussion and contribute to the GitHub repo:
GitHub: https://github.com/intel-ai/oox
Slides: https://www.slideshare.net/secret/ifHWb6mqkpBOn2
Instead of P.S.: more examples
MergeSort
template <typename RAIter>
oox_node mergesort(RAIter begin_it, RAIter end_it)
{
size_t const base_case_bound = 50;
if (end_it - begin_it < 2)
return;
if (end_it - begin_it < base_case_bound) {
for (RAIter it = begin_it + 1; it < end_it; ++it)
for (RAIter mentor = it; mentor > begin_it && *mentor < *(mentor - 1); --mentor)
std::iter_swap(mentor, mentor - 1);
return oox_node();
}
RAIter middle_it = begin_it + (end_it - begin_it) / 2;
auto left = oox_run(mergesort, begin_it, middle_it);
auto right= oox_run(mergesort, middle_it, end_it);
return oox_run( oox_join(left, right), [=] { std::inplace_merge(begin_it, middle_it, end_it) });
}Quicksort
template <typename RAIter>
oox_node quicksort(RAIter begin_it, RAIter end_it)
{
size_t const base_case_bound = 350;
if (end_it - begin_it < base_case_bound) {
for (RAIter it = begin_it + 1; it < end_it; ++it)
for (RAIter mentor = it; mentor > begin_it && *mentor < *(mentor - 1); --mentor)
std::iter_swap(mentor, mentor - 1);
return oox_node();
}
typedef typename std::iterator_traits<RAIter>::value_type Value;
std::iter_swap(begin_it, begin_it + (end_it - begin_it) / 2);
Value const &pivot = *begin_it;
RAIter greater_or_equal_begin = std::partition(begin_it + 1, end_it, [&pivot](Value const &value) { return value < pivot; });
RAIter less_end = greater_or_equal_begin - 1;
std::iter_swap(begin_it, less_end);
return oox_join( oox_run(quicksort, begin_it, less_end), oox_run(quicksort, greater_or_equal_begin, end_it) );
}NBody
template <typename A, template <typename A> class T>
oox_node nbody(T<A> const &triangle, std::vector<A> &forces, divconq_range2d const &range)
{
size_t const base_case_bound = 180;
if (range.rows().end() <= range.cols().begin()) {
return;
}
if (range.rows().end() - range.rows().begin() < base_case_bound) {
for (size_t i = range.rows().begin(); i < range.rows().end(); ++i)
for (size_t j = range.cols().begin(); j < std::min(range.cols().end(), i); ++j) {
A const &term = triangle.at(i - 1, j);
forces[i] += term;
forces[j] -= term;
}
return oox_node();
}
auto self = static_cast<void(*)(T<A> const &, std::vector<A> &, divconq_range2d const &)>(&nbody<A, T>);
auto subtask = std::bind(self, std::ref(triangle), std::ref(forces), std::placeholders::_1);
auto d=oox_join( oox_run(subtask, range.a11()), oox_run(subtask, range.a22()) );
return oox_join( oox_run(d, subtask, range.a12()), oox_run(v, subtask, range.a21()) );
}Wavefront
void Serial_LCS( const char* x, size_t xlen, const char* y, size_t ylen )
{
int F[MAX_LEN+1][MAX_LEN+1];
for( size_t i=1; i<=xlen; ++i )
for( size_t j=1; j<=ylen; ++j )
F[i][j] = x[i-1]==y[j-1] ? F[i-1][j-1]+1 : max(F[i][j-1],F[i-1][j]);
}
void Straight_LCS( const char* x, size_t xlen, const char* y, size_t ylen )
{
oox_var<int> F[MAX_LEN+1][MAX_LEN+1];
auto f = [x,y,xlen,ylen](int F11, int F01, int F10) {
return x[i-1]==y[j-1] ? F11+1 : max(F01, F10);
};
for( size_t i=1; i<=xlen; ++i )
for( size_t j=1; j<=ylen; ++j )
F[i][j] = oox_run(f, i+j==0?0:F[i-1][j-1], j==0?0:F[i][j-1], i==0?0:F[i-1][j]);
int res = oox_get_and_wait(F[MAX_LEN][MAX_LEN]);
}
void RecursiveLCS( const char* x, size_t xlen, const char* y, size_t ylen ) {
struct RecursionBody {
int (*F)[MAX_LEN+1];
const char *X, *Y;
RecursionBody(int f[][MAX_LEN+1], const char* x, const char* y) : F(f), X(x), Y(y) {}
oox_node operator()(Range2D r) {
if( !r.is_divisible4() ) {
for( size_t i=r.rows().begin(), ie=r.rows().end(); i<ie; ++i )
for( size_t j=r.cols().begin(), je=r.cols().end(); j<je; ++j )
F[i][j] = X[i-1]==Y[j-1] ? F[i-1][j-1]+1 : max(F[i][j-1], F[i-1][j]);
return oox_node();
}
oox_node node00 = oox_run( *this, r.quadrant(0,0) );
oox_node node10 = oox_run( *this, r.quadrant(1,0), node00 );
oox_node node01 = oox_run( *this, r.quadrant(0,1), node00 );
return oox_run( *this, r.quadrant(1,1), node10, node01 );
}
};
int F[MAX_LEN+1][MAX_LEN+1];
RecursionBody rf(F, x, y);
oox_wait_and_get( rf(Range2D(0,xlen,0,ylen)) );
}