Comments 103
ООО! Как в тему! Буквально неделю назад думал, как мне снимать телеметрию с дрифт-кара, чтобы потом строить траекторию с учетом положения кузова!
Как раз думал два датчика положения запихать: один в нос, второй в корму — чтобы фиксировать положение кузова при движении.
Подумывал как раз о создании своего устройства, которое будет ориентироваться по базовым станциям расставленным вокруг трэка.
А тут такой приятный сюрприз! Все сделано! Ничего не надо конструировать.
Правда предзаказ делать не буду. Не складывается у меня с ними что-то… Black Swift еще в феврале должен был приехать… Куплю, когда на рынок выйдет. :)
P.S.
Вопрос: а разве одна статичная базовая станция позволит получить хорошую точность? Как и сколько нужно расставлять устройств, чтобы получить точность в 10 сантиметров в условиях квадрата 500х500 метров чистого поля?
Как раз думал два датчика положения запихать: один в нос, второй в корму — чтобы фиксировать положение кузова при движении.
Подумывал как раз о создании своего устройства, которое будет ориентироваться по базовым станциям расставленным вокруг трэка.
А тут такой приятный сюрприз! Все сделано! Ничего не надо конструировать.
Правда предзаказ делать не буду. Не складывается у меня с ними что-то… Black Swift еще в феврале должен был приехать… Куплю, когда на рынок выйдет. :)
P.S.
Вопрос: а разве одна статичная базовая станция позволит получить хорошую точность? Как и сколько нужно расставлять устройств, чтобы получить точность в 10 сантиметров в условиях квадрата 500х500 метров чистого поля?
В классической ДНСС одной БС недостаточно. Но здесь, по-видимому, эффект достигается за счет близкого расположения стационарной точки и высокой скорости обмена информации. Все-таки в NTRIP оперируют километровыми расстояниями, а тут считанные метры.
В вашем случае я бы рекомендовал использовать связку из GPS и инерциальных систем. Если местность открытая и финансы позволяют, можно вообще расставить лазерную телеметрию, хотя это и достаточно сложно. Зато результат будет стоить того.
Можно вообще ничего не изобретать: положить в машину полетный контроллер от бпла, который умеет записывать логи. Точность достигается за счет GPS + ACC + GYRO. Я конечно с рулеткой не измерял, но выглядит довольно точно:
В каждой точке можно посмотреть положение по трем осям и ещё кучу всего.
Путь полета
В каждой точке можно посмотреть положение по трем осям и ещё кучу всего.
Смею предположить, что идет интерполяция, т.к. бпла не может резко изменить курс, а точность сама по себе низкая.
Мне же хочется максимальную точность получить, чтобы иметь возможность анализировать действия пилота и соотносить эти действия с поведением машины, в том числе измерять инерцию траектории относительно действий пилота. Тут интерполяция не прокатит и точность нужна действительно высокая.
Мне же хочется максимальную точность получить, чтобы иметь возможность анализировать действия пилота и соотносить эти действия с поведением машины, в том числе измерять инерцию траектории относительно действий пилота. Тут интерполяция не прокатит и точность нужна действительно высокая.
Ну машина куда менее резко может поменять курс, чем, допустим квадрокоптер:
Ну и для реального анализа важен акселерометр и гироскоп. GPS только для построения красивого графика поверх карты трассы и удобного нахождения участков для анализа (это можно и по видео сделать). А если идея именно анализировать положение на трассе (дальность от зачетных конусов, угол в повороте), то это легче сделать установив 3-4 камеры на машину и просматривая их самому.
Я не хочу переубеждать, хотя не очень представляю чем такой анализ может помочь. Я сам участвовал в дрифт-сооревнованиях, так что имею хорошее представление о процессе.
Но в любом случае снимать 2 точки gps для определения угла машины — это как-то странно. Можно использовать 2 точки для повышения точности, но угол намного легче и намного точнее снимать с магнитометра (компаса).
тут квадрокоптер летает по трассе с наложенно после телеметрией с датчиков
Ну и для реального анализа важен акселерометр и гироскоп. GPS только для построения красивого графика поверх карты трассы и удобного нахождения участков для анализа (это можно и по видео сделать). А если идея именно анализировать положение на трассе (дальность от зачетных конусов, угол в повороте), то это легче сделать установив 3-4 камеры на машину и просматривая их самому.
Я не хочу переубеждать, хотя не очень представляю чем такой анализ может помочь. Я сам участвовал в дрифт-сооревнованиях, так что имею хорошее представление о процессе.
Но в любом случае снимать 2 точки gps для определения угла машины — это как-то странно. Можно использовать 2 точки для повышения точности, но угол намного легче и намного точнее снимать с магнитометра (компаса).
То есть используем центр для определения позиции и компас для определения угла. Звучит логично и дешевле.
Для машины точность определения ориентации с помощью GPS будет около 0.3 градуса с темпом в 10 Гц. Компасу такое и не снилось. Более того, поставив третью станцию рядом с трассой, получим ещё и точную привязку к ней (упремся в точность карты, а не измерений координат)
Скорее не ориентации а путевого угла. Для ориентации нужно 2 приемника и 2 антенны, либо приемник который имеет два антенных входа
Следуя за фразой AllexIn
два датчика положения запихать: один в нос, второй в корму, я и имел в виду два приемника и две антенны.
Слышал и 20Гц есть приемники.
В данный момент у меня собирается лог с приемника с темпом 1кГц. ;)
Только для потребителей от этого толку нет, т.к. для сопровождения сигнала используются следящие системы с полосой от 0.1 до 30 Гц. Все измерения являются случайными процессами со временем корреляции в доли и единицы секунды. От того, что мы их начнем выдавать чаще, информации не прибавится — это как смотреть на процесс падения яблока с помощью камеры с 1000fps.
Только для потребителей от этого толку нет, т.к. для сопровождения сигнала используются следящие системы с полосой от 0.1 до 30 Гц. Все измерения являются случайными процессами со временем корреляции в доли и единицы секунды. От того, что мы их начнем выдавать чаще, информации не прибавится — это как смотреть на процесс падения яблока с помощью камеры с 1000fps.
Да, комасу такого и не снилось. В страшном сне. Бюджетный магнитометр — скорость обновления: 160 Hz, точность — 1 градус.
GPS с обновлением 10 Hz уже не бюджетный.
А для GPS 0.3 градуса получится, если точность GPS будет 1см (не забыли, что ошибка будет у обоих GPS), даже в статье обещают только 2см. В более реальной ситуации — точность около 20см градус угла будет получаться с ошибкой в почти 5 градусов, это при учете, что GPS разнесены на 4 метра.
В общем компас выигрывает :)
GPS с обновлением 10 Hz уже не бюджетный.
А для GPS 0.3 градуса получится, если точность GPS будет 1см (не забыли, что ошибка будет у обоих GPS), даже в статье обещают только 2см. В более реальной ситуации — точность около 20см градус угла будет получаться с ошибкой в почти 5 градусов, это при учете, что GPS разнесены на 4 метра.
В общем компас выигрывает :)
У компаса 1 градус — это цена деления, а не точность. На практике приходится ориентироваться на 5-10 градусов.
0.3 градуса — практически достижимая точность для GPS/ГЛОНАСС при разнесении антенн примерно на 2 метра. При благоприятных условиях (слабой многолучевости) удается вытянуть около 0.1 градуса.
0.3 градуса — практически достижимая точность для GPS/ГЛОНАСС при разнесении антенн примерно на 2 метра. При благоприятных условиях (слабой многолучевости) удается вытянуть около 0.1 градуса.
У компаса 1 градус — это цена деления, а не точность.
Откуда такая информация? Например у дешевого (цена чуть больше доллара за чип) цена деления 0,005 градуса. Естественно это значение не принимается за точность.
На практике приходится ориентироваться на 5-10 градусов.
Вам однозначно не повезло с экземпляром. Или у вас чисто теоретические знания?
0.3 градуса — практически достижимая точность для GPS/ГЛОНАСС при разнесении антенн примерно на 2 метра. При благоприятных условиях (слабой многолучевости) удается вытянуть около 0.1 градуса.
Для определения угла с точностью в 0.1 градус надо 2 точки на расстоянии 2х метров с точностью большей, чем 0.4мм! Что-то не похоже на правду. Или вы говорите об относительных углах, которые в предоставленной задаче довольно бесполезны?
Если говорить не только о абсолютных, но и относительных, то добавив акселерометр (который в том же кристале) и гироскоп мы получаем частоту обновления не менее 400 герц и точность в сотые, если не тысячные градуса.
Я понимаю, что вы обожаете GPS, но может стоит смотреть чуть шире? Есть много путей для достижения цели, но какие-то решения подходят лучше, а какие-то хуже. Если вы не против, то закончим беседу на этом месте?
Я обожаю комплексированные с инерциалками приемники, дополненные антенными решетками, позволяющими подавлять помехи и определять ориентацию ;)
AllexIn нужно снимать телеметрию о прохождении корчем трассы, которая сводится к табличке: время | положение (x, y, z) | скорость центра масс (vx, vy, vz) | угол между меридианом и осью автомобиля
На это Вы выдвинули тезис, что угол
Практические цифры для ГНСС-угломера я привел выше. Хорошая инерциалка для динамичного объекта может дать результаты ещё лучше ГНСС, но для обсуждаемого применения я бы её рассматривать не стал.
AllexIn нужно снимать телеметрию о прохождении корчем трассы, которая сводится к табличке: время | положение (x, y, z) | скорость центра масс (vx, vy, vz) | угол между меридианом и осью автомобиля
На это Вы выдвинули тезис, что угол
намного точнее снимать с магнитометра, с чем я согласиться не могу. Ибо, говоря о компасе, на практике можно рассчитывать лишь на 5-10 градусов, что для дрифт-корча многовато.
Практические цифры для ГНСС-угломера я привел выше. Хорошая инерциалка для динамичного объекта может дать результаты ещё лучше ГНСС, но для обсуждаемого применения я бы её рассматривать не стал.
Я тоже люблю когда железо работает. И чем лучше, тем приятнее :)
Но мне ещё нравится получать данные схожей точности с приборов в десятки раз дешевле. Что возможно при потребности только в части функций дорогого устройства (как раз этот случай).
Я конечно не знаю про бюджет данного корча (или болида в случае установки такого оборудования?).
И я ни в коем случае не хочу никого переубеждать, но лог приведенного выше вида позволит записать плата стоимостью в 20 долларов + gps по выбору — от 15.
Точность будет очень приличная. Говоря про магнитометр я подразумевал использование акселерометра и гироскопа для увеличения точности, что абсолютно не сложно, т.к. с самого начала я предлагал использовать контроллер от бпла и предполагал использование opensource софта для него. И не видел смысла так подробно описывать в первом комментарии.
К сожалению я не имел дела с таким профессиональным оборудованием, и выразил свое сомнение в точности определения координат в 0.4мм. При относительном отсчете угла я допускаю, что это возможно. Правда не знаю какое оборудование для этого требуется. Возможно посоветуете какой-нибудь приемник и антенну для точности в пару сантиметров? Можно и относительной. К сожалению используемый мной ublox lea-6 ничего подобного выдать не может. И я не знаю какой может.
А то, что данные будут точными со стандартных датчиков бпла — я могу утверждать. И в этом не сложно убедится за 2 шага:
— посмотрев алгоритмы навигации, чтобы узнать как он интерполирует данные и с какой скоростью.
— посмотреть как он летает.
Если погрешности будут такие, как вы говорите, то так летать он не сможет.
Ещё раз предлагаю закончить беседу, я не могу аргументированно говорить что-то за или против вашего решения, т.к. никогда его не использовал, а теоретизировать без практического применения — это пустое. Спецификация это одно, реальные данные это другое.
Я бы и рад уже с вами согласиться, что компас будет не точным, но реальность показывает, что мое предложение будет работать.
И ещё раз повторю свой вопрос: возможно вы посоветуете какой-нибудь приемник и антенну GPS для бпла, который лучше lea-6?
Но мне ещё нравится получать данные схожей точности с приборов в десятки раз дешевле. Что возможно при потребности только в части функций дорогого устройства (как раз этот случай).
Я конечно не знаю про бюджет данного корча (или болида в случае установки такого оборудования?).
И я ни в коем случае не хочу никого переубеждать, но лог приведенного выше вида позволит записать плата стоимостью в 20 долларов + gps по выбору — от 15.
Точность будет очень приличная. Говоря про магнитометр я подразумевал использование акселерометра и гироскопа для увеличения точности, что абсолютно не сложно, т.к. с самого начала я предлагал использовать контроллер от бпла и предполагал использование opensource софта для него. И не видел смысла так подробно описывать в первом комментарии.
К сожалению я не имел дела с таким профессиональным оборудованием, и выразил свое сомнение в точности определения координат в 0.4мм. При относительном отсчете угла я допускаю, что это возможно. Правда не знаю какое оборудование для этого требуется. Возможно посоветуете какой-нибудь приемник и антенну для точности в пару сантиметров? Можно и относительной. К сожалению используемый мной ublox lea-6 ничего подобного выдать не может. И я не знаю какой может.
А то, что данные будут точными со стандартных датчиков бпла — я могу утверждать. И в этом не сложно убедится за 2 шага:
— посмотрев алгоритмы навигации, чтобы узнать как он интерполирует данные и с какой скоростью.
— посмотреть как он летает.
Если погрешности будут такие, как вы говорите, то так летать он не сможет.
Ещё раз предлагаю закончить беседу, я не могу аргументированно говорить что-то за или против вашего решения, т.к. никогда его не использовал, а теоретизировать без практического применения — это пустое. Спецификация это одно, реальные данные это другое.
Я бы и рад уже с вами согласиться, что компас будет не точным, но реальность показывает, что мое предложение будет работать.
И ещё раз повторю свой вопрос: возможно вы посоветуете какой-нибудь приемник и антенну GPS для бпла, который лучше lea-6?
Я использовал U-blox LEA-6 только в версии Q, он обладает достойными характеристиками точности, помехоусточивости и чувствительности кодовых измерений. Но если стоит задача перейти к сантиметрам, то это только фазовые измерения. Для этого у u-blox есть приемники с индексом P, но я с ними, к сожалению, на практике не встречался.
Можно воспользоваться решением от НАВИСа, есть соответствующая статья на хабре. На днях были испытания, относительно опорной Leica в режиме RTK получилось 0.5-2 см.
Если вернуться к углам, магнитометр и ИНС — немного разные вещи ;) Но мы друг друга поняли. Интересно узнать о Вашем опыте — о каком приемнике и opensource софте идет речь?
Можно воспользоваться решением от НАВИСа, есть соответствующая статья на хабре. На днях были испытания, относительно опорной Leica в режиме RTK получилось 0.5-2 см.
Если вернуться к углам, магнитометр и ИНС — немного разные вещи ;) Но мы друг друга поняли. Интересно узнать о Вашем опыте — о каком приемнике и opensource софте идет речь?
Я lea-6q даже не встречал. Задачи перейти к сантиметрам особо нет. Спросил скорее для самообразования — доступно такое или нет без rtk. Ставить опорные точки возможности нет, т.к. бпла летает на 40+км. Да и не хочется с этим заморачиваться.
Опыт у меня не очень-то большой, т.к. это всё только как хобби. Всего пару раз записывал треки не с бпла. Для этого использовал полетный контроллер с немного модифицированным кодом от arduplane и GPS приемник lea-6h. Калибровки и проверки не проводил, т.к. точность в пару метров была допустима, но по построенному треку выглядело очень точно.
Ну и постоянно пишутся треки с моего бпла — arduplane на контроллере pixhawk + lea-6h + второй компас. Выглядят тоже довольно точными.
Опыт у меня не очень-то большой, т.к. это всё только как хобби. Всего пару раз записывал треки не с бпла. Для этого использовал полетный контроллер с немного модифицированным кодом от arduplane и GPS приемник lea-6h. Калибровки и проверки не проводил, т.к. точность в пару метров была допустима, но по построенному треку выглядело очень точно.
Ну и постоянно пишутся треки с моего бпла — arduplane на контроллере pixhawk + lea-6h + второй компас. Выглядят тоже довольно точными.
GPS компас — это одно устройство с двумя антеннами. При этом активно используется то, что если координаты считать по одним и тем же спутникам, то систематическая ошибка на обоих антеннах будет одинаковой. Т.е. важно не абсолютная точность, а относительная.
А для учёта положения кузова не проще ли использовать компас?
Осталось только понять откуда узнает свои точные координаты первый Reach в связке.
И зачем целый компьютер аж с линуксом для простой коррекции от базовой станции?
И о каких базовых станциях идет речь — GSM? А все ли базовые станции выдают этот NTRIP?
И зачем целый компьютер аж с линуксом для простой коррекции от базовой станции?
И о каких базовых станциях идет речь — GSM? А все ли базовые станции выдают этот NTRIP?
Первый ручками устанавливаем.
Ведь для 90% задач важно не высокая точность в глобальном плане, а высокая точность относительно некой зоны. А это как раз без проблем достигается.
Ведь для 90% задач важно не высокая точность в глобальном плане, а высокая точность относительно некой зоны. А это как раз без проблем достигается.
Это что за 90% задач?
У меня первая мысль была про геодезические измерения. Скажем перепроверка земельных участков.
Но такое решение не пойдет видимо.
У меня первая мысль была про геодезические измерения. Скажем перепроверка земельных участков.
Но такое решение не пойдет видимо.
Геодезические, пусть правда и достаточно дорогие, используют несколько иной алгоритм, основанный, в первую очередь, на длительном сборе статистики. Грубо говоря, ставят в одну точку на ночь, это позволяет получить малые СКО.
После целых суток усреднения все еще будет ненулевая вероятность ошибки координаты более 1 м.
В принципе поскольку усреднение ничего не гарантирует всегда будет ненулевая вероятность большой ошибки.
В принципе поскольку усреднение ничего не гарантирует всегда будет ненулевая вероятность большой ошибки.
Первым делом геодезист находит точку привязки и потом уже от неё начинает плясать по полю. Если нужно не просто составить план участка, а с его реальными координатами, то берут для начала одну заведомо известную точку. Их довольно много. В том числе и в городе. То там стол, то какой-то кол вбит в асфальт.
Так что придя на местность (или еще в офисе, зная координаты), просто пропишите координаты начальной точки.
Точка кстати может быть и не на вашем участке, а на соседнем. Но думаю дорогу найдете.
Так что придя на местность (или еще в офисе, зная координаты), просто пропишите координаты начальной точки.
Точка кстати может быть и не на вашем участке, а на соседнем. Но думаю дорогу найдете.
Устанавливаете ее стационарно и усредняете полученные с помощью спутников координаты. После тысячи измерений точность будет в сантиметрах.
Не будет
имеется систематическая ошибка? растолкуйте, что ли.
1. Усреднение вообще не гарантирует что результат будет точнее отдельных измерений. Это зависит от распределения случайных ошибок — для нормального распределения все ок, для распределения Коши Вас ждет большой сюрприз :)
2. Может существовать систематическая ошибка зависящая от положения приемника и погоды. Т.е. в среднем (по всей Земле и за весь год) она может быть нулевой, но вот именно в данном месте именно эту неделю будет стабильно набегать большая ошибка
2. Может существовать систематическая ошибка зависящая от положения приемника и погоды. Т.е. в среднем (по всей Земле и за весь год) она может быть нулевой, но вот именно в данном месте именно эту неделю будет стабильно набегать большая ошибка
1. Согласен, но есть какие-либо исследования, говорящие о том, что в случае со спутниковой навигаецией имеет место распределение Коши или подобное?
2. Может существовать, а может и не существовать. Я где-то читал, что радиомаяки DGPS в глуши, где нет связи, именно так и работают. Возможно, что там далеко не 1000 измерений, а, например, окно с количеством измерений накопленных за последний месяц, но примерно так и работает.
2. Может существовать, а может и не существовать. Я где-то читал, что радиомаяки DGPS в глуши, где нет связи, именно так и работают. Возможно, что там далеко не 1000 измерений, а, например, окно с количеством измерений накопленных за последний месяц, но примерно так и работает.
1. Что тут исследовать? В рамках одного созвездия (точнее определения координат на одних и тех же спутниках) у вас будет одно смещение, причем более-менее постоянное, как только ваша аппаратура переключит спутники, с которых принимает сигнал, на другие (банально один скрылся за горизонтом, но появился другой), смещение сразу же прыгнет скачком, и в рамках нового сеанса будет примерно постоянным. Вот только прыгают они не по распределению Гаусса. Если смотреть на орбиты спутников это становится понятным.
2. Так работают, да не так. Ничего там не усредняется. Есть такая замечательная вещь, как фильтры. В данном случае используется МНК, накапливающий большое количество измерений и решающий систему из n уравнений, где n — количество спутников, которые видел приемник за время работы.
2. Так работают, да не так. Ничего там не усредняется. Есть такая замечательная вещь, как фильтры. В данном случае используется МНК, накапливающий большое количество измерений и решающий систему из n уравнений, где n — количество спутников, которые видел приемник за время работы.
> В данном случае используется МНК
Спасибо, если бы Indemsys так написал сразу, то вопросов бы не было.
Спасибо, если бы Indemsys так написал сразу, то вопросов бы не было.
Из 10 метров ошибки кодовых измерений менее метра можно отнести к шумовой компоненте. Остальное — сильно коррелированные процессы.
Например, прошлая суббота, слежение за сигналом ГЛОНАСС L1 СТ №1, СКО шумовой составляющей псевдодальности на 200 секундном интервале составляет около 40 см:
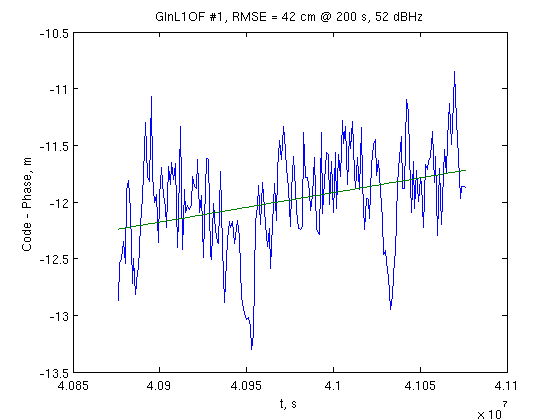
А вот так выглядит на этом же интервале сумма ионосферной ошибки и шума (шум тут в полтора раза больше из-за метода обработки):
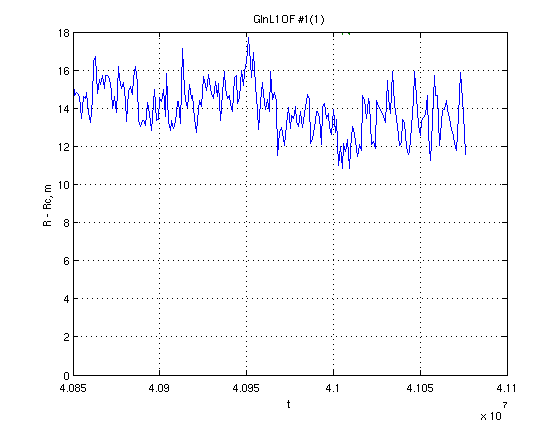
Как видно из графика, усреднять ионосферную ошибку бессмысленно. А есть ещё целый букет прочих ошибок со схожим поведением — многолучевость, литерная зависимость в приемнике, тропосфера, ошибки эфемерид и т.д.
Например, прошлая суббота, слежение за сигналом ГЛОНАСС L1 СТ №1, СКО шумовой составляющей псевдодальности на 200 секундном интервале составляет около 40 см:
А вот так выглядит на этом же интервале сумма ионосферной ошибки и шума (шум тут в полтора раза больше из-за метода обработки):
Как видно из графика, усреднять ионосферную ошибку бессмысленно. А есть ещё целый букет прочих ошибок со схожим поведением — многолучевость, литерная зависимость в приемнике, тропосфера, ошибки эфемерид и т.д.
И о каких базовых станциях идет речь — GSM? А все ли базовые станции выдают этот NTRIP?
Базовые станции — имеется ввиду приемник ГНСС который неподвижно стоит в точке с известными координатами и вырабатывает поток RTCM 3х.
NTRIP — это транспортный протокол для передачи поправок. Обычно провайдеры поправок (например Навгеоком) предлагают доступ к поправкам за абонентскую плату.
учитывая его низкую стоимость (предзаказ $545 за двойной набор и $285 за одинарный)Простите, а в сравнении с чем это низкая стоимость?
с другими двухчастотниками за сотни тысяч рублей
А с чего там такая цена? Эксклюзивные закрытые алгоритмы?
Так он одночастотный, разве что многосистемный GPS+GLONASS одновременно.
По сравнению с другими ДНСС.
Узнавал тут сколько стоит — мне предложили решение от 5000$. И это так, по дружески. :)
Узнавал тут сколько стоит — мне предложили решение от 5000$. И это так, по дружески. :)
Что-то я не совсем понял.
Модуль нужно подключать к интернету, ну чтоб он получал NTRIP — ?
И как это делается в глухом лесу?
У u-blox M8 точность позиционирования — 2.5 метра CEP (Autonomous), как и у многих других приемников.
Даже если использовать связку из 2 таких модулей и установить за точку отсчета одну координату, а потом вычислять дельту = разница между установленной координатой и вычисляемой динамически. И потом эту дельту вычитать у искомой точки. Плюс даже если учитывать выдаваемую модулем погрешность, мне кажется все равно точность будет условной, ну во всяком случае многое будет зависеть от радиопроводности среды вокруг двух этих точек измерения.
Модуль нужно подключать к интернету, ну чтоб он получал NTRIP — ?
И как это делается в глухом лесу?
У u-blox M8 точность позиционирования — 2.5 метра CEP (Autonomous), как и у многих других приемников.
Даже если использовать связку из 2 таких модулей и установить за точку отсчета одну координату, а потом вычислять дельту = разница между установленной координатой и вычисляемой динамически. И потом эту дельту вычитать у искомой точки. Плюс даже если учитывать выдаваемую модулем погрешность, мне кажется все равно точность будет условной, ну во всяком случае многое будет зависеть от радиопроводности среды вокруг двух этих точек измерения.
Не спортивно. Надо с rtl-sdr свистка получать IQ поток и декодировать программно сразу все существующие системы.
Если Realtek не принципиален, то это будет выглядеть вот так: www.ifen.com/products/sx3-gnss-solutions/sx3-gnss-software-receiver.html
Помнится был такой свисток. Что с ними сейчас не понятно
Неуклонно продолжу пытаться выбивать дурость из маркетологов в виде фразы «точность до сантиметров» в GPS (вообще в ГНСС в целом).
Во-первых, сама по себе точность в навигационных измерениях не несет никакого смысла, покуда нет эталона, нет шкалы, нет погрешности измерения. Есть только математическое ожидание положения и дисперсия (либо СКО, зависит от задачи). Такое положение дел позволяет подставлять под понятие «точности» что угодно. Хоть 3 СКО, хоть одна сотая СКО. Дело в том, что если понимать под точностью размер эллипсоида, в котором вы гарантированно (с вероятностью 1) находитесь, то для гауссовского распределения это эллипсоид с бесконечными радиусами. А если брать за точность такую СКО, в которой вы находитесь с вероятностью 0.0001 — там вообще миллиметры.
Во-вторых, без указания геометрического фактора созвездия, без указания характеристик местности, погоды — это вообще бессмысленная величина. Разумеется, взять идеальные условия, когда GDOP минимальный из возможных (это хорошо), на небе ни тучки, нет аномалий (т.е. он равномерный) озоновый слой, а вы находитесь в чистом поле и нет переотрожений — там и обычный приемник получит маленькое СКО. Особенно если накопит информацию в течение длительного времени (скажем, за сутки). А если еще есть дополнительные наземные маяки (грубо говоря, попросту помещяют аппаратуру спутника на земле в стационарной точке, его эффемериды известны с геодезической точностью)…
Теперь берем дождливую (хотя бы облачную) погоду, город на подобие Токио, где переотражений миллионы, только без ретрансляторов, а высота зданий позволяет видеть одновременно 4 спутника (с меньшим количеством навигация не осуществляется), 2 из которых «еле еле», да и GDOP у них зашкаливает. Там никакой дифференциальный режим не поможет.
С точностью разобрались, а вот касательно самого устройства — если там действительно антенна на 72 канала с таким впечатляющим списком поддерживаемых навигационных систем — дайте две, можно чуть дешевле, но без софта? Сам как хобби с радостью напишу ему прошивку. Хотя все же смущает, что 24-канальная антенна в геодезической аппаратуре размером с небольшую тарелку (блюдце), а тут с 72 размером с 5 копеек.
Во-первых, сама по себе точность в навигационных измерениях не несет никакого смысла, покуда нет эталона, нет шкалы, нет погрешности измерения. Есть только математическое ожидание положения и дисперсия (либо СКО, зависит от задачи). Такое положение дел позволяет подставлять под понятие «точности» что угодно. Хоть 3 СКО, хоть одна сотая СКО. Дело в том, что если понимать под точностью размер эллипсоида, в котором вы гарантированно (с вероятностью 1) находитесь, то для гауссовского распределения это эллипсоид с бесконечными радиусами. А если брать за точность такую СКО, в которой вы находитесь с вероятностью 0.0001 — там вообще миллиметры.
Во-вторых, без указания геометрического фактора созвездия, без указания характеристик местности, погоды — это вообще бессмысленная величина. Разумеется, взять идеальные условия, когда GDOP минимальный из возможных (это хорошо), на небе ни тучки, нет аномалий (т.е. он равномерный) озоновый слой, а вы находитесь в чистом поле и нет переотрожений — там и обычный приемник получит маленькое СКО. Особенно если накопит информацию в течение длительного времени (скажем, за сутки). А если еще есть дополнительные наземные маяки (грубо говоря, попросту помещяют аппаратуру спутника на земле в стационарной точке, его эффемериды известны с геодезической точностью)…
Теперь берем дождливую (хотя бы облачную) погоду, город на подобие Токио, где переотражений миллионы, только без ретрансляторов, а высота зданий позволяет видеть одновременно 4 спутника (с меньшим количеством навигация не осуществляется), 2 из которых «еле еле», да и GDOP у них зашкаливает. Там никакой дифференциальный режим не поможет.
С точностью разобрались, а вот касательно самого устройства — если там действительно антенна на 72 канала с таким впечатляющим списком поддерживаемых навигационных систем — дайте две, можно чуть дешевле, но без софта? Сам как хобби с радостью напишу ему прошивку. Хотя все же смущает, что 24-канальная антенна в геодезической аппаратуре размером с небольшую тарелку (блюдце), а тут с 72 размером с 5 копеек.
антенна на 72 канала
24-канальная антенна
Каналы к антеннам не имеют никакого отношения. Каналы — в приемниках.
Каюсь, сглупил. Да и 72 не так много, судя по уточненной информации в профессиональной технике вообще 220 и 440 каналов. Аппаратное обеспечение — моя слабая сторона, познания радиоприемников заканчиваются на супер-гетеродинных.
Число каналов приемника больше числа спутников практически бессмысленно.
Тут имеет место маркетинговая уловка. Некоторые производители считают за канал измерения по одной из квадратур в одном из частотных диапазонов. То бишь в случае приёма всех сигналов один спутник ГЛОНАСС занимает аж 4 канала. Некоторые квадратуры отдельно не считают, тогда только два канала на спутник.
Наземные базовые станции не работают по тому же принципу, по которому работают спутники. Они служат для вычисления поправок — это совершенно иной принцип работы.
Только не надо говорить, что вы это написали «чтобы упростить объяснение».
Только не надо говорить, что вы это написали «чтобы упростить объяснение».
Нет, я не про дифференциальный режим говорил. Если честно, я не вспомню, как называется технология, однако она точно применяется в аэропортах и в морских портах, как и базовые станции.
Ведь мы можем а: ретранслировать сигнал со спутников (ретрансляторы, обычно есть в больших городах, чтобы уж совсем печальной картины по видимости спутников не было), б: ну ооочень грубо сказать — закопать спутник в землю, который будет притворяться одним из спутников созвездия. Приемнику то все равно, где там этот радио-маяк — в космосе движется со скоростью 3 км/с или покоится на Земле. Ему альманах подавай. Только, покуда он находится совсем рядом, а так же нет ошибок определения эфемерид (покуда он на месте стоит), задержек и искажений ионосферы — результат того стоит. Однако система, конечно же, получается дорогой.
Примерно так же работают и помехи gps, только они уже намеренно рассылают неверные координаты.
Ведь мы можем а: ретранслировать сигнал со спутников (ретрансляторы, обычно есть в больших городах, чтобы уж совсем печальной картины по видимости спутников не было), б: ну ооочень грубо сказать — закопать спутник в землю, который будет притворяться одним из спутников созвездия. Приемнику то все равно, где там этот радио-маяк — в космосе движется со скоростью 3 км/с или покоится на Земле. Ему альманах подавай. Только, покуда он находится совсем рядом, а так же нет ошибок определения эфемерид (покуда он на месте стоит), задержек и искажений ионосферы — результат того стоит. Однако система, конечно же, получается дорогой.
Примерно так же работают и помехи gps, только они уже намеренно рассылают неверные координаты.
Я понимаю, что вы говорили не про дифференциальный метод, а про что-то, чего нет на само деле.
Нет никаких ретрансляторов спутникового сигнала в больших городах, а ретранслировать сигнал бессмысленно, потому что будет нарушена задержка, т.е. псевдодальности будут вычислены неверно. Прекратите выдумывать на ходу.
Нет никаких ретрансляторов спутникового сигнала в больших городах, а ретранслировать сигнал бессмысленно, потому что будет нарушена задержка, т.е. псевдодальности будут вычислены неверно. Прекратите выдумывать на ходу.
Ретрансляторов нет, но, почему-то, их можно купить. Загадка. Открою вам тайну, но задержка считается по опорному сигналу (именно для этого нужен четвертый спутник), без этого вы с теми часами, которые стоят в портативных навигационных устройствах (я, по крайней мере, не слышал о навигаторе с атомными часами) будете сейчас в Москве, через три секунды в Химки, и так дальше.
Что касается того, о чем я говорил — вот патент. На сколько это используется — судить не берусь. Могу сказать, что слышал, что такое используется в некоторых аэропортах в Германии, но, покуда источников найти не могу, утверждать не буду, что это так. Хотя исключать тоже не стоит. Идея то достаточно логичная.
Что касается того, о чем я говорил — вот патент. На сколько это используется — судить не берусь. Могу сказать, что слышал, что такое используется в некоторых аэропортах в Германии, но, покуда источников найти не могу, утверждать не буду, что это так. Хотя исключать тоже не стоит. Идея то достаточно логичная.
Хм, хотя с 4-ым спутником я погорячился, тут скорее то, что ретранслятор дает одинаковую задержку сразу на все сигналы.
Патент не означает вообще ничего.
Секретов вы мне никаких не откроете.
Ретрансляторы для помещений — это совершенно не то же самое, о чем говорите вы (нечто городского масштаба и т.п.).
И действительно — пока нет подтверждений вашим словам, не говорите ничего в настоящем времени («используется»).
Секретов вы мне никаких не откроете.
Ретрансляторы для помещений — это совершенно не то же самое, о чем говорите вы (нечто городского масштаба и т.п.).
И действительно — пока нет подтверждений вашим словам, не говорите ничего в настоящем времени («используется»).
К слову, сама антенна и в геодезических приемниках сравнительно невелика, просто она установлена внутри корпуса вместе с металлической конструкцией, которая образует ground plane. Так что водрузив эту Tallysman TW4721 на алюминиевую пластину, можно несколько улучшить результат приема.
Выбивать дурость из маркетологов это хорошо. Но всё же не стоит так огульно утверждать, что
С чего вы взяли, что нет эталона и шкалы? Всё есть.
Да и маркетологи перевирают только то, что им говорят специалисты. А специалисты чаще всего оперируют СКО и CEP (я про зарубежную литературу говорю, в нашей все гораздо разнообразнее). В принципе достижимые точности для этой штуки, особенно если они не врут про хорошую антенну.
покуда нет эталона, нет шкалы, нет погрешности измерения. Есть только математическое ожидание положения и дисперсия (либо СКО, зависит от задачи
С чего вы взяли, что нет эталона и шкалы? Всё есть.
Да и маркетологи перевирают только то, что им говорят специалисты. А специалисты чаще всего оперируют СКО и CEP (я про зарубежную литературу говорю, в нашей все гораздо разнообразнее). В принципе достижимые точности для этой штуки, особенно если они не врут про хорошую антенну.
В спеках на Reach указано что он поддерживает только GPS L1 и судя по приведенному графику это закономерно дает точность скорее до 10 см чем до 2 см. Но все равно отличная штука, особенно за такие деньги :). Буду болеть за то чтобы у ребят продукт получился и он реально уложился в заявленные спецификации и цены
Перевожу на русский язык: ребята взяли коммерчески доступный GPS приёмник U-blox NEO-M8T и твердотельный акселерометр, распаяли их на плату с разъемом для intel eddison и установили на последний открытое ПО под название rtklib.
В этом нет ничего уникального и это не rocket science. Любители этой связкой пользуются уже очень давно. Но готового программно-аппаратного комплекса я еще на ней не встречал.
В этом нет ничего уникального и это не rocket science. Любители этой связкой пользуются уже очень давно. Но готового программно-аппаратного комплекса я еще на ней не встречал.
Но при этом все равно тема Ntrip caster-ов остается нераскрытой.
Где их искать и как получать к ним доступ?
Где их искать и как получать к ним доступ?
есть целая международная сеть. Иногда доступ к данным бесплатный, иногда платный.
Начинать поиски можно отсюда www.ntrip.org
Начинать поиски можно отсюда www.ntrip.org
Не густо. Что интересно в России нет ни одного.
в России есть, в том числе и станции, входящие в международную сеть. Можно еще тут поискать igs.bkg.bund.de А вообще про такие вещи местные геодезисты должны быть в курсе.
Только это не имеет никакого отношения к NTRIP. Станции IGS пригодны для получения данных для пост-обработки записанных сигналов (при том через некоторое заметное время, когда их собственные данные оказываются обработаны и попадают в архив), а не для работы в реальном времени, как в случае с NTRIP, VRS и так далее.
там и NTRIP тоже есть
igs.bkg.bund.de/root_ftp/NTRIP/streams/streamlist_igs-ip.htm
igs.bkg.bund.de/root_ftp/NTRIP/streams/streamlist_igs-ip.htm
А российские станции можно найти тут
igs.bkg.bund.de/root_ftp/NTRIP/streams/streamlist_world-wide.htm
igs.bkg.bund.de/root_ftp/NTRIP/streams/streamlist_world-wide.htm
Это хорошо, что вы сами себя поправили.
В России должна работать всего одна станция — Звенигород. Но, на сколько мне известно, она не работает.
В России должна работать всего одна станция — Звенигород. Но, на сколько мне известно, она не работает.
разве что интересно, как прикрутили к rtklib акселерометр. «Из коробки» он этого не умеет.
Простите моё невежество, поправьте если что.
Зная точные координаты домашнего компьютера и имея подключенный к нему GPS приемник можно получить с обычным сотовым телефоном позиционирование с точностью до сантиметров в радиусе до 10 км?
Зная точные координаты домашнего компьютера и имея подключенный к нему GPS приемник можно получить с обычным сотовым телефоном позиционирование с точностью до сантиметров в радиусе до 10 км?
Тут пару моментов — приемник должен качественно обрабатывать фазу сигналов GNSS, а так же необходима качественная антенна. В итоге (на данный момент) на телефоне вряд ли получится.
Подобное устройство с USB интерфейсом (я наткнулся на http://www.ppmgmbh.com/ppm_design/ppm-design-pdf/10xx.pdf )
Сколько такая вешь может стоить, $100?
Для Андроидов есть софт разный — https://play.google.com/store/apps/details?id=de.pilablu.gnsscommander
То есть может сработать, да?
Сколько такая вешь может стоить, $100?
Для Андроидов есть софт разный — https://play.google.com/store/apps/details?id=de.pilablu.gnsscommander
То есть может сработать, да?
не знаю насчет данной коробочки но на Интергео в этом году называли стоимость двухчастотного блока с RTK (с возможностью подключения по Bluetooth) — 7000$
А есть ли какое либо оборудование позволяющее строить навигацию внутри локальной системы координат. То есть я устанавливаю 3 передатчика по периметру поля и задаю им их локальные координаты. Далее, ходя по этому полю с приёмником, я хочу получать мои локальные координаты с очень высокой точностью.
Sign up to leave a comment.
Reach: GPS с точностью до сантиметра