Балансирующий робот на Arduino Nano и шаговых моторах
5 min
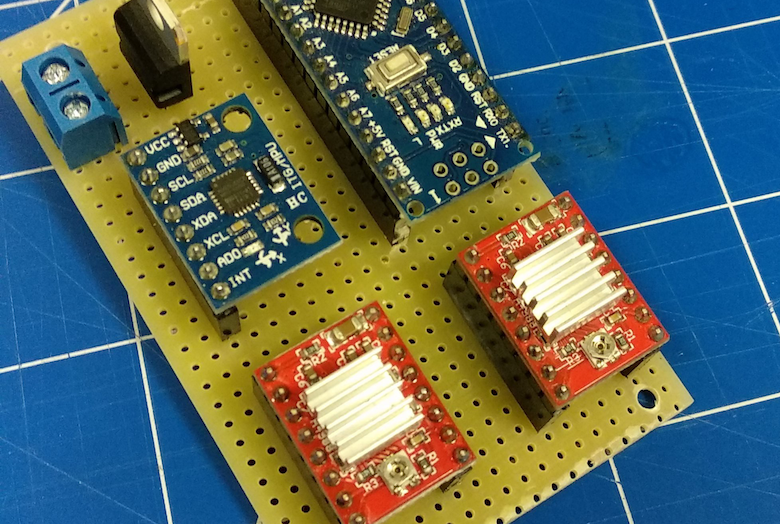
Моя версия популярного балансирующего робота. Для тех, кто хочет разобраться в математике, железе и алгоритме стабилизации.

Пользователь
Моя версия популярного балансирующего робота. Для тех, кто хочет разобраться в математике, железе и алгоритме стабилизации.



Обычно адепты нового Того-самого-лучшего-языка пишут свои рекламные мини-программы для обучения и продвижения примерно так:

Disclaimer: Предлагаемый вашему вниманию бот является демонстрацией того, как создавать ботов с помощью Bot Framework и Wit.ai, и не претендует на прохождение теста Тьюринга или даже на способность поддерживать сложную беседу. Поэтому предлагаю не ругать интеллектуальность бота в комментариях. Кроме того, создание данного бота не означает, что мы приветствуем и поощряем различные технологии потустороннего общения.


Однажды на новогодних каникулах, лениво листая интернет, бракоделы в нашем* R&D офисе заметили видео с испытаний прототипа роботакси. Комментатор отзывался восторженным тоном – революция, как-никак. Но тренированное ухо расслышало в шуме с испытательной площадки еще кое-что. Контроллер скорости (штука для управления тягой винтов) сыграл мелодию при старте, как это любят делать пилоты дронов, которые часто используют полётный контроллер Betaflight. Неужели там бета-флайт? Ну, или какая-то из ее немногих разновидностей.
Перед глазами побежали флешбеки, где-то из глубин подсознания всплыла забытая уже информация о прошивках для Тойоты на миллионы тысяч строк Си и 2 тысячи глобальных переменных (Toyota: 81564 ошибки в коде).
После просмотра исходного кода Betaflight на гитхабе стало еще страшнее, и чем дальше, тем хуже. Это – управляющая программа для тяжелого устройства с острыми винтами, которое летает высоко, быстро. Становится страшно: игрушки это одно, но я бы не хотел летать, на таком такси. Но ведь можно иначе? Можно, решили мы! И решили это доказать. На Avito был куплен акробатический FPV-“квадрик” на базе STM32F405, для отладки – Discovery-платы для этого же контроллера, а дальше все как в тумане..