Robot Operating System это фреймворк который позволяет эффективно программировать современных роботов.

User
Robot Operating System это фреймворк который позволяет эффективно программировать современных роботов.
 * от англ. «unscented filtering and nonlinear estimation» (by Переводчик Google)
* от англ. «unscented filtering and nonlinear estimation» (by Переводчик Google)

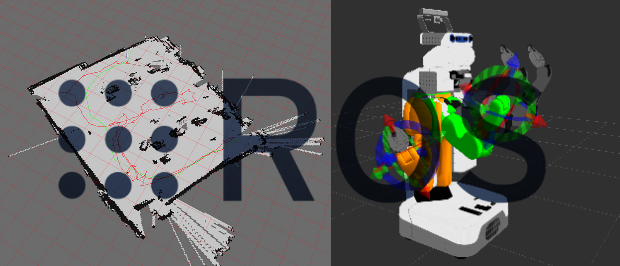
В данной статье будут рассмотрены подходы и библиотеки, предоставляемые ROS для решения задач автономной и не очень навигации.
Также будут рассмотрены несколько специфичных для антропоморфных роботов пакетов. Любой робот (наверняка даже машинка со средне-мощным бортовым ПК под управлением Linux и парой веб камер) наверняка найдет здесь что — нибудь для себя.