Насколько сложна тема машинного обучения? Если Вы неплохо математически подкованы, но объем знаний о машинном обучении стремится к нулю, как далеко Вы сможете зайти в серьезном конкурсе на платформе Kaggle?
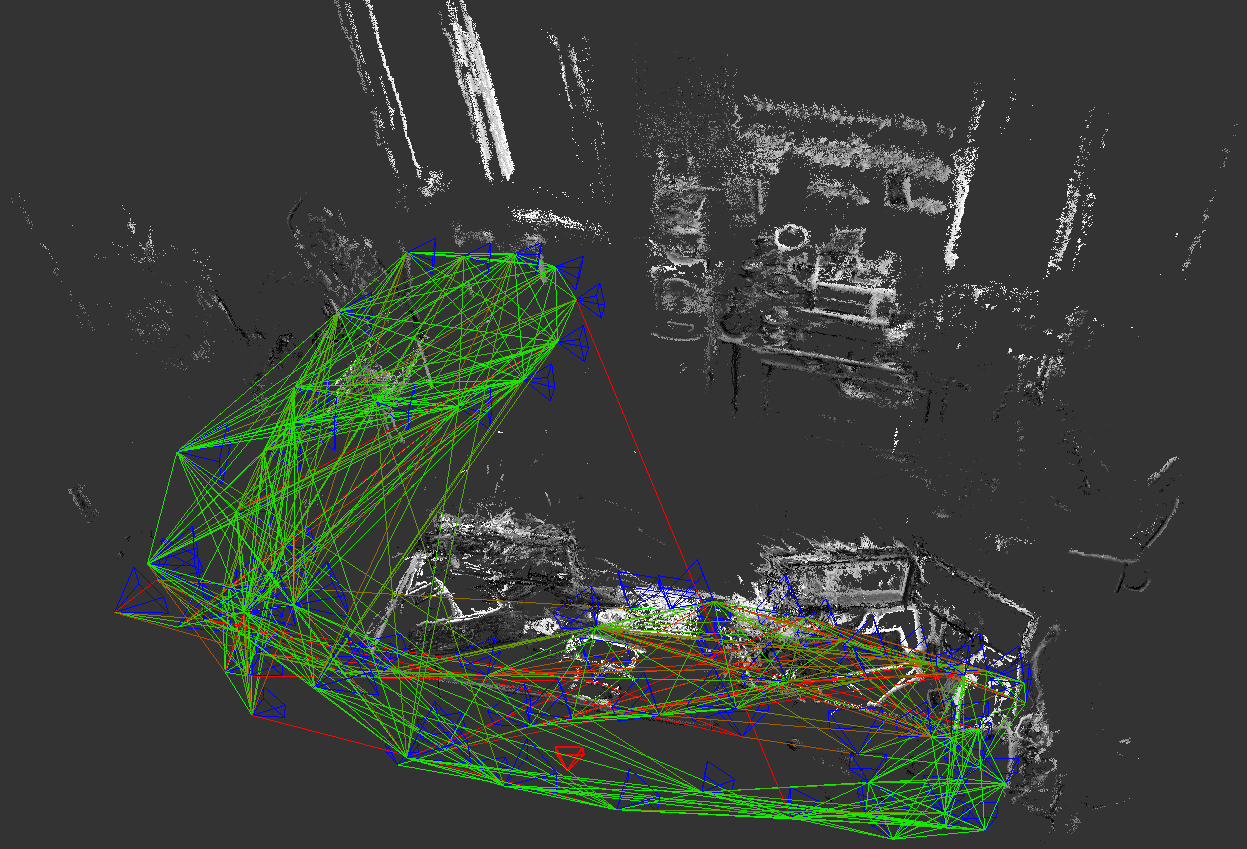
После небольшого перерыва мы продолжаем серию статей-уроков по SLAM. В предыдущих выпусках мы подготовили программное окружение, а также поработали с монокулярным SLAM. Под катом – урок по использованию SLAM на основе стереокамеры и камеры глубины. Мы расскажем о настройке пакетов и оборудования и дадим советы по использованию двух ROS-пакетов: ставшего традиционным RTAB-Map и свежего вкусного ElasticFusion.
Продолжаем серию статей-уроков по визуальному SLAM уроком о работе с его монокулярными вариантами. Мы уже рассказывали об установке и настройке окружения, а также проводили общий обзор в статье о навигации квадрокоптера. Сегодня попробуем разобраться, как работают разные алгоритмы SLAM, использующие единственную камеру, рассмотрим их различия для пользователя и дадим рекомендации по применению.
После опубликования статьи об опыте использования монокулярного SLAM мы получили несколько комментариев с вопросами о подробной настройке. Мы решили ответить песней серией статей-уроков о SLAM. Сегодня предлагаем ознакомиться с первой из них, в которой поставим все необходимые пакеты и подготовим окружение для дальнейшей работы.
Сейчас для многих компьютерное зрение не является тайной за семью замками. Однако новые алгоритмы и подходы не перестают впечатлять. Одним из таких направлений является монокулярное зрение, в особенности SLAM. О том, как мы решали задачу навигации квадрокоптера, оснащенного единственной камерой, и пойдет речь в этой статье.