STM32, C++ и FreeRTOS. Разработка с нуля. Часть 2
10 мин
Туториал
Введение
В прошлой публикации STM32, C++ и FreeRTOS. Разработка с нуля. Часть 1 я остановился на том,
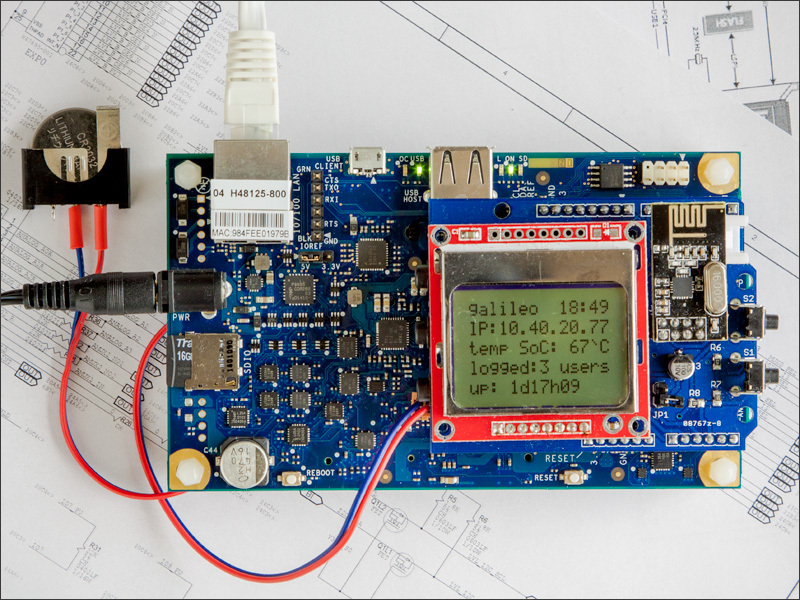
SR0: Устройство должно измерять три параметра (иметь три переменных): Температуру микропроцессора, Напряжение VDDA, Напряжение с переменного резистора
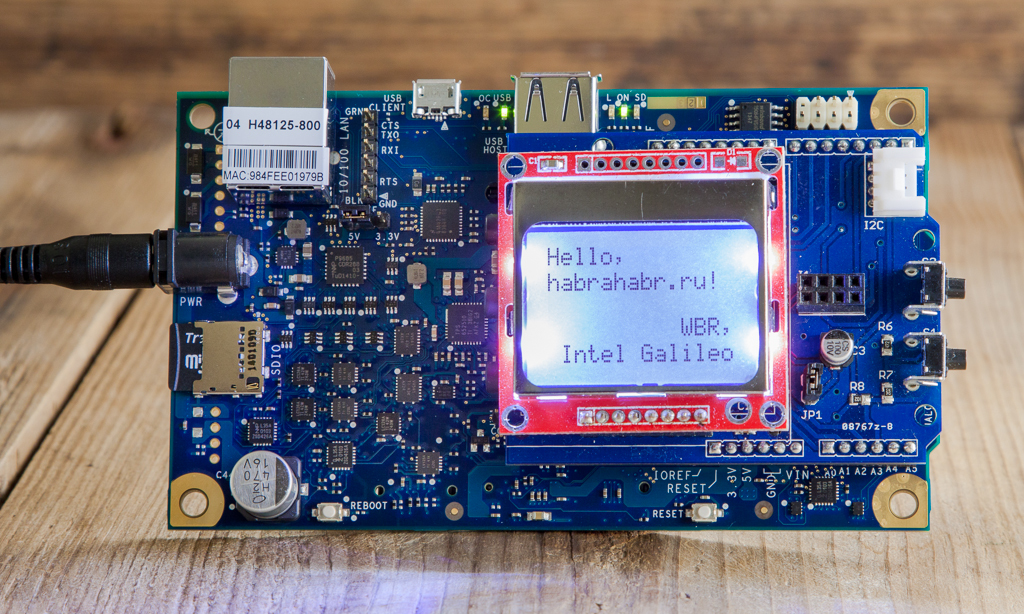
SR1: Устройство должно выводить значение этих переменных на индикатор.
SR2: Единицы измерения для Температуры микропроцессора — градусы Цельсия, для остальных параметров — вольты.
SR3: При нажатии на кнопку 1, на индикаторе должен показываться экран со следующей измеряемой переменной,
SR4: При нажатии на кнопку 1 Светодиод 1 должен изменять свое состояние
SR5: При нажатии на кнопку 2, на индикаторе должен поменяться режим отображения переменных с постоянного показывания переменной на последовательное (менять экраны раз в 1.5 секунды) при следующем нажатии с последовательного на постоянное,
SR6: При нажатии на кнопку 2 светодиод 2 должен менять свое состояние.
SR7: Светодиод 3 должен моргать раз в 1 секунду.