Все знают, что Россия — энергетическая сверхдержава, она же – «разорванная в клочья Обамой бензоколонка». Но не все знают, как это может отражаться в области развития математического моделирования. Расскажу одну жизненную историю.
Начну с далекого 2007 года. Довелось мне в те времена поработать на крупном заводе, который «эффективные менеджеры» как раз делили на несколько отдельных предприятий, каждое из которых крутилось, как могло. В том цеху, который и стал одним из таких предприятий, на токарных станках могла крутиться (и крутилась!) металлическая болванка размером с автобус. А в печку для нагрева металла можно было затолкать паровоз. Целиком. Когда я в первый раз увидел токарный станок, на котором крутится и обтачивается деталь размером с автобус, моему восторгу не было предела. Гордость за страну переполняла до состояния «в зобу дыханье сперло». А потом старожилы показали ту часть цеха, где стояли фундаменты таких же станков и пояснили:
- А вот тут были станки для точной обработки. Их продали китайцам по цене металлолома.
- А почему вот другие не продали?
- Потому, что у них точность обработки такая, что их только в металлолом можно сдать. Поэтому они здесь работают и крутятся как могут, и обтачивают валы турбин Siemiens.
Схема бизнеса был гениальна: Siemiens привозил на завод многотонные болванки, их неделями и месяцами обтачивали до состояния заготовок и увозили для чистовой обработки в Германию. Где уже выполняли чистовую доводку на точных и дорогих станках. Главные затраты при черновой обработке – это износ станков и инструмента, зарплата токаря и электроэнергия, необходимая для вращения тонн металла. Поскольку электроэнергия в РФ дешевле немецкой, недели обработки болванок с лихвой окупают транспортировку, а низкая точность обработки не требует дорогого обслуживания и мало чувствительна к износу еще советского оборудования. В итоге весь бизнес заключался в «перепродаже» дешевой электроэнергии из РФ в Германию, но в виде металлических обточенных болванок.

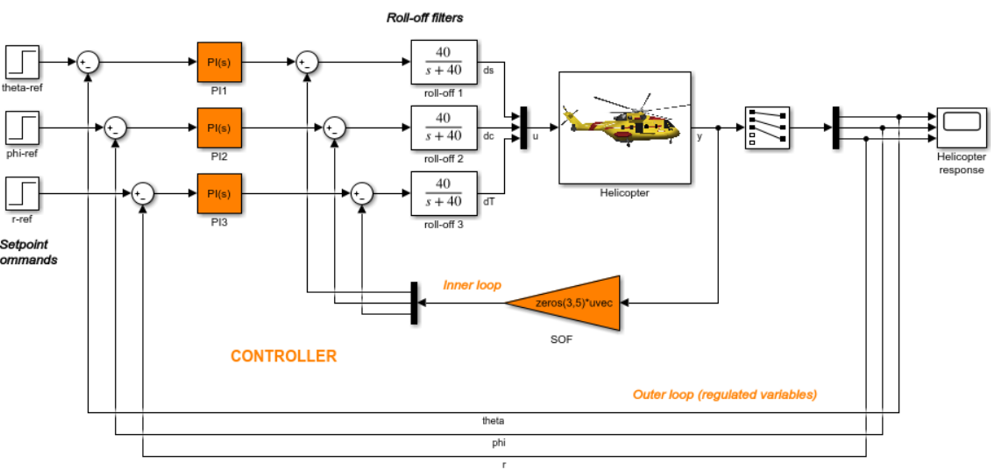
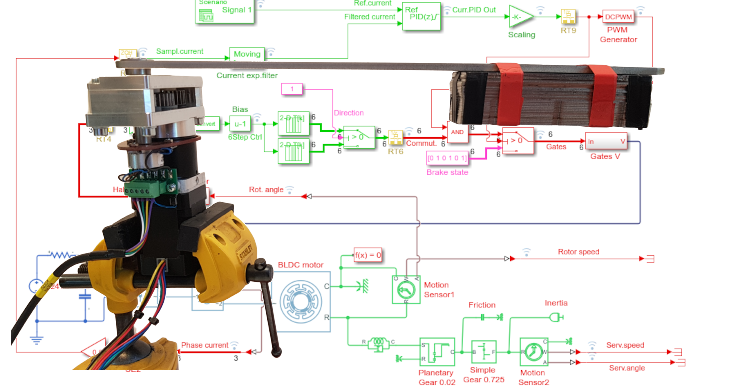
 . В этой работе рассматриваются особенности этого настройщика на примере построения двухконтурной системы управления.
. В этой работе рассматриваются особенности этого настройщика на примере построения двухконтурной системы управления.