Comments 267
hackaday.com/2012/07/01/spoofing-gps-and-getting-your-own-uav
и еще gpsworld.com/drone-hack
Если следующая точка маршрута находится на 250 метров к северо-востоку и преобразована в координаты, то после подмены координат — она окажется в 1к метрах на северо-запад — значит дрон ломанется совсем в другую сторону и для этого не требуется знать его маршрут.
Вот если захочется довести дрон к конкретному месту ложной цели — тогда надо знать куда и как он полетит, а для сбивания его с толку — не надо.
Это при условии, что дрон полностью автономен и идёт только по GPS, без компаса и других средств контроля.
Чтобы увести дрон по своему маршруту
адрес поменяют на адрес бесполётной зоны не чтобы «увести», а чтобы дрон просто приземлился (большинство гражданских дронов отказываются летать вблизи аэропортов и т. п.).
Цена данного имитатора — больше миллиона рублей, но есть и бесплатные любительские варианты.
Тут дело в том, что те, кто может сделать хорошую передающую антенну — вовсе не любят хулиганить. А без антенны — можно и киловатт вкачать, дальность будет десятки метров. Ну и антенну ещё и разместить надо. Ибо на частотах GNSS — работает только прямая видимость, сигналы сильно ослабляются и отражаются стенами домов.
Ну а о дешевом лабораторном решении itsar уже рассказывал.
Я знаю, что есть еще дешевле решение.
Про ГЛОНАСС — спасибо! В следующий раз проверю, если повезет.
Палку в центре и спектр проверю на генераторе. Но там все нормально, в предыдущей статье есть ссылка на ролик, где виден спектр с симулятора профессора Эбинумы на Ettus B210. И там все в порядке, палки нет. И спектр GPS-сигнала действительно немного другой, но тут уж что есть.
Большое спасибо за дельный комментарий!
Вот желающие делают. Там есть и пример моей реализации симулятора. Так что как должен выглядеть спектр GPS знаю. Сейчас подумал, если некоторые приемники GPS цепляются а другие не цепляются на сигнал симулятора и торчит палка посредине спектра то это может быть просто глюкавый симулятор. Некоторые приемники не цепляются если в сигнале от спутника нет доплеровского сдвига. Еще… такой спектр от GPS с палкой есть на выходе IF GPS приемника, возможно это сигнал из Внуково передают в место переизлучения. Есть и такие системы.
hackrf использую исключительно из за уже готовой RF части.
А BladeRF использовать не пробовали? Или вы используете и АРМовскую часть 5го циклона?
Так что, это или утка, или очень быстро когонить посадят, а остальные разбегутся.
А что за пеленгатор?
Так это они на своём телефоне меняют координаты, а не транслируют GPS-сигнал.
- Кто такой демон
- Что же делает ваш девайс
- Какое отношение демон имеет к рабочей тетради по английскому языку
- Удалось ли найти рабочую тетрадь и помогло ли вам в этом сие устройство
- Кто такая ВАРЬКА?
Очень жаль, что за ответами на первые 2 вопроса пришлось ознакомиться с другими статьями. Из этого же сочинения я понял только одно — найти того, кого вы искали не удалось. Для чего, а главное для КОГО написано это в таком стиле — вопрос. Ведь можете (1, 2) же более доходчиво писать, чтобы было понятно не только Варькам. К чему такое обилие эпитетов и лирических отступлений?
Всеми силами пытался понять:
Кто такой демон
Это же элементарно, Ватсон!
Большой толковый словарь подсказывает нам, что
ДЕМОН, -а; м. [греч. daimōn] 1. В античной мифологии: добрый или злой дух, оказывающий влияние на жизнь, судьбы людей, народов.
Единственный известный «дух, оказывающий влияние на жизнь, судьбы людей», обитающий в окрестностях Кремля, занимается исключительно обманом GPS/ГЛОНАСС навигаторов.
в конце 2016 года темой многих СМИ стали искажения GPS и ГЛОНАСС в центре Москвы, около Кремля: навигаторы вдруг показывали своим пользователям, что они находятся в аэропорту Внуково. Мы решили выяснить, действительно ли нужно обладать возможностями спецслужб, чтобы спровоцировать подобные сбои.
Прочитав данный отрывок я сразу понимаю о чем речь и стоит ли мне читать данный материал. В данном же случае я из вступления не улавливаю связи между
- Хабами «Разработка под AR и VR», «Информационная безопасность», «Глобальные системы позиционирования» и «Геоинформационные сервисы»
- Полтергейстом на картинке
- Играми с демонами по расписанию
- Поиском рабочей тетради по английскому языку
- Улицей или человеком «Варварка»
- Эпиграфом в котором что-то про радугу говорится
- Автором, который по зову природы расчехляет свое оружие
Я очень много читал/слышал про аномалию геопозиции в центре Москвы и всегда хотел проверить ее на себе. Эта аномалия мешает жить всем бла-бла-бла.
И вот, совершенно случайно, я тоже попался на крючок при попытке найти «книжные магазины» через гугл-карты. Вдруг, пропала красная площадь, а вместо нее появились какие-то непонятные улицы. Хорошо, что с собой был девайс, про который можно прочитать в моей предыдущей статье.
Примерно такое вступление я бы хотел видеть в вашей статье. На мой взгляд, из него будет сразу понятно, о чем речь в статье.
правда, я сначала подумал, что это «читальный зал» и очередное фентези ;) (но потом вчитался и всё стало ясно)
Я «не в теме», технические подробности прошлых статей проскроллил, понял только про фазированную решетку и общий принцип. А эта статья вообще уровня «для домохозяек», и это правильно — ибо технические подробности в предыдущих статьях.
— Какой вздор и какая нелепость, — возмутился я. — К чему вы тогда ломались, переносили дело в какое-то Конго, мазали двери глупейшим соком алоэ, когда так было просто — описать одесский случай и прямо рассказать о поведении Толмачева! И потом вы тут нагородили того, чего и не было… Откуда вы взяли, что Толмачев был в каком-то «совете государственных деятелей»? Просто он приехал в три часа ночи из кафешантана и закрыл благородное собрание, продержав под арестом полковника, которого по закону арестовывать не имел права. При чем здесь «совет государственных деятелей»?
— Я думал, так безопаснее…
— А что такое за дикая, дурного тона выдумка: заклеил двери липким соком алоэ? Почему не просто — наложил печати?
— А вдруг бы догадались, что это о Толмачеве? — прищурился молодой человек." (С) А.Аверченко
Остается неясным, почему глушилка такая мощная, но пеленгатор направление на нее так и не поймал.
Интересно, все-таки что это за «демон». Есть версия, что это ретранслятор-«глушилка» для беспилотников, перебрасывает она именно во Внуково, т.к. во всех дронах по умолчанию зашит запрет на полеты над аэродромами. Но тогда встает вопрос, почему она работает не постоянно, а с неким интервалом?
Интересно, все-таки что это за «демон»
Защита от террактов, не?
Или синхронизациях времени на таких устройствах.
Может и правда, против дронов.
Дроны сейчас делают мизерные, едва заметные. Например, при определенном софте на зараженном пк отслеживать диод и бинарным способом извлекать информацию…
Фантазировать можно сколько угодно, но более вероятнее, что такая штука сделана в целях безопасности, нежели считать, что там сидит злой дядька и от нефиг делать подменяет сигнал
ВВ с 100-200 грамм в тротиловом эквиваленте, немного поражающих элементов + дрон… И активация по координатам. И собственно достаточно.
Для этого необходимо почитать историю создания GPS. Эта сеть спутников создавалась не столько для людей сколько для наведения крылатых ракет. Еë прообразом была система NAVSTAR. Если на Красной площади показывает Внуково, значит ракеты должны лететь в Медвежьи озëра.
Едет он и едет. Иду и иду. Бегу и бегу. В этом могут и обязаны помешать только сотрудники МВД или хулиганы))) И никаких демонов или пушек-локаторов не нужно!
Не сотворяй сущностей сверх необходимого, россиянин!
Пожалуй только стоит еще поработать над обработкой запеленгованного сигнала, чтобы получить сглаженную оценку. Можно, например, скомплексировать с показаниями гироскопов.
Хотя, возможно, у вас это уже сделано. По видео трудно сказать.
ARKit уже можно сказать появился, ждем когда ARCore зарелизится для «всех» и будет нам счастье…
Кстати, основной сайт проекта недоступен, случайность?
Хм… Значит, фальшивые спутники имеют строго определенные характеристики… Значит, можно написать свой собственный трекер, который будет сможет их отфильтровывать?
Во-вторых, есть технологии пространственной компенсации помех. Может что-нибудь удастся написать об их применении в будущем.
Но как уже написали — тут еще и специально генерируется сильная помеха, которая забивает входной тракт AFE. Это приводит к подстройке АРУ, чтобы оставаться в и так ограниченном(для массовых приемников) динамическом диапазоне входного сигнала.


{kind=link}
А какие еще есть способы? По сотовому сигналу не слишком точно.
В этом случае можно поставить глушилку в машину и не портить людям жизнь.— тут тот самый случай, когда безопасность жестко конфликтует с удобством, и не везде бывает применима.
Есть как минимум иннерционные устройства, вполне себе реальные и использующиеся… Если нет достаточно жестких ограничений на размер и внешний вид устройства — можно много чего придумать, начиная от камеры, периодически или постоянно отправляющей изображение, или какого-либо датчика, который, к примеру, по изменению пролетающего внизу дорожного покрытия будет также передавать изменение направления… Да много чего можно придумать, заканчивая банальным хвостом…
Решение на "Томагавках" давно опробовано. Не знаю как сейчас, а раньше карта высот была зело секретной штукой.
It still amazes me how well frequency domain information is preserved through hard-limiting!
Просто удивительно как всё работает с однобитным АЦП. В современных чипах уж 2-4 битная АЦП, в проф.приёмниках 10-12 бит.
По практике я вижу, что если с выхода NT1065 оставить только знаковй разряд, то становится чуть хуже.
Уже во всех современных бытовых чипах кроме измерения псевдодальности также измеряется фаза несущей. Чем выше битность — тем меньше срывов PLL и тем точнее измеряется фаза.
Принято считать что фаза в GPS-приёмниках измеряется с точностью не лучше 1% (и могу предположить что чем выше битность — тем ближе мы к данной оценке). Псевдодальность (т.е. фаза кода) соответственно имеет аппаратную точность около 3м, а фаза несущей — первые миллиметры. Поэтому используют их комбинацию «carrier smoothed pseudo-range», если срывов фазы нет, то аппаратная точность стремится к точности фазы несущей. Пусть это не миллиметры, но дециметры тоже хорошо.
отсюда все о многоразрядах бред. О АРУ тоже бред, ибо сигнал со спутников существенно ниже уровня тепловых шумов и много сигнала просто не бывает, опять же,
привел ссылку на GNSS-SDRLIB где каждый может все проверить. Я проверял.
1. Производители геодезических приёмников не дураки.
2. Оригинал может и 1 бит, но за счет ионосферы все частоты приходят в разное время и это уже не тот оригинальный сигнал что был (групповая задержка и пр.). Кстати именно этим эффектом объясняется почему для кодовой дальности ионосферная задержка положительная, а для фазы несущей — отрицательная (у меня это долго не укладывалось в голове).
3. К бытовым не относится, а про геодезические двухчастотники. Т.к. P(Y) код неизвестен, один из методов измерения фазы L2 это squaring (code-free measurement). Сигнал с АЦП возводится в квадрат и подаётся в кореллятор, в котором удвоенная частота L2. Возможно битность тут тоже помогает.
написано 500кГц
Ого…
Поднял книгу «Hofmann-Wellenhof, GPS Theory and Practice, 1994», используется свойство что P(Y) модулируется на обеих частотах L1 и L2

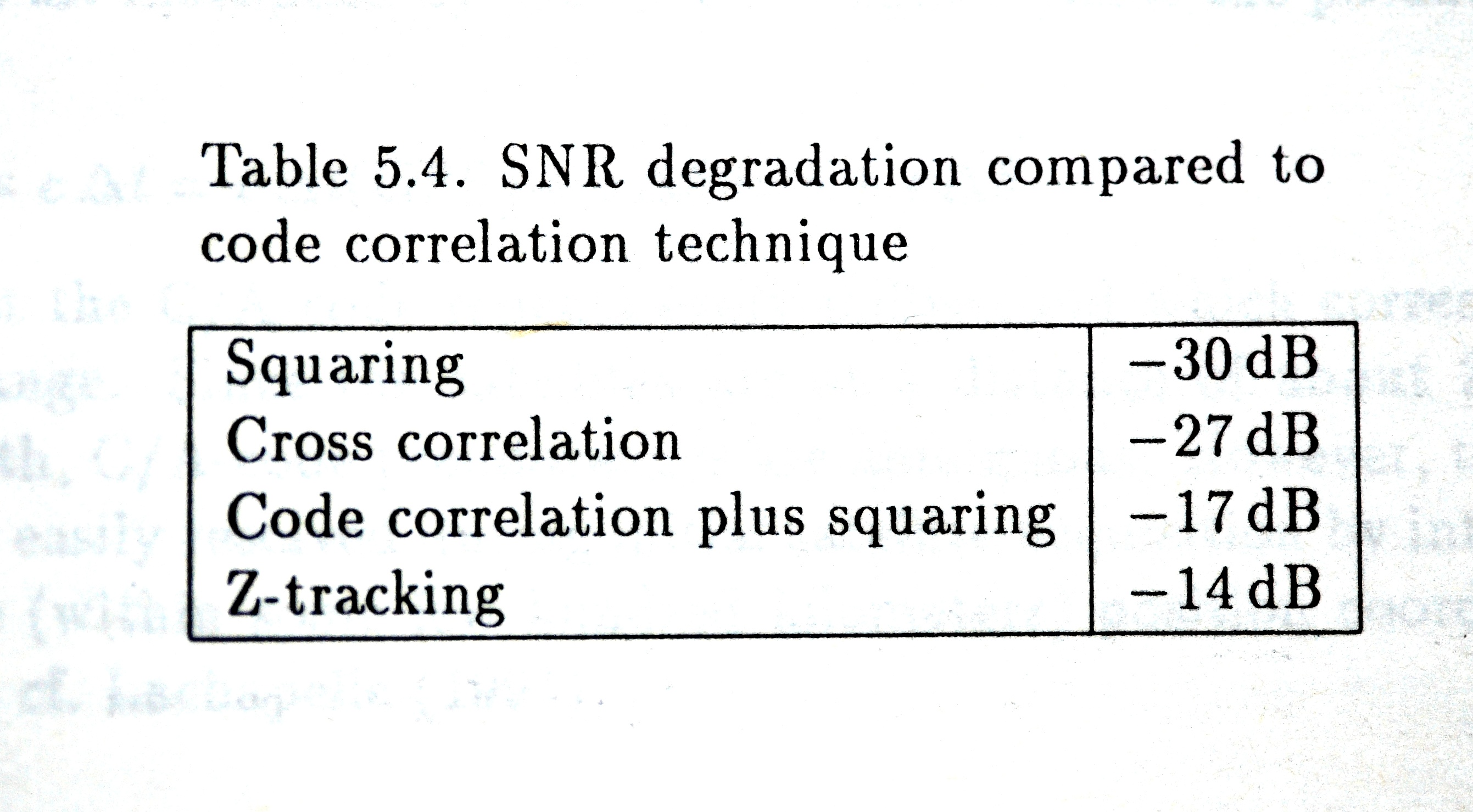
Кажется Z-tracking изобретен в Ashtech русскими авторами, но это надо в патентах проверять.
// generatePcode.m generates GLONASS P-code.
//
// Pcode = generatePcode(PRN)
//
// Inputs:
// PRN — PRN number of the sequence.
//
// Outputs:
// Pcode — a vector containing the desired P code sequence
// (chips).
//------------------------------------------------------------------------------
if PRN == 101 then //PRN=101 — GLONASS PRN code generation.
reg = -1*ones(1,25);
for i=1:5110000
g3(i)=reg(25);
msave=reg(3)*reg(25);
reg(2:25)=reg(1:24);
reg(1)=msave;
end;
Pcode=-g3';
end
Добрый день, Иван. Дайте, пожалуйста, совет: скольки разрядный АЦП мне использовать для немодулированной гармоники?
{kind=link}
Разве умножение аналогового сигнала на единицу или минус единицу лешает его аналоговости?
Мы с вами сошлись на мысли, что гармоника (та самая, которую модулируют) — аналоговый сигнал. Модулятор её дёргает по фазе на 180 градусов. По свойствам тригонометрических функций это эквивалентно умножению на плюс или минус единицу. Так что же в этой процедуре отнимает у сигнала его аналоговость и ставит на новую ступень абстракции, требующую однобитного и обязательно однобитного АЦП?
«если мы берем немодулированную гармонику» т.е. немодулированный гармонический сигнал то количество бит ЦАП модулятора = бесконечности, ибо это аналоговый сигнал, тогда надо использовать бесконечно-битный АЦП, что собственно все и делают если используют аналог.
Конец цитаты
Уже первая ваша фраза «скольки разрядный АЦП мне использовать для немодулированной гармоники» вызвала у меня легкое офигение, ибо гармоника это гармоника… четная там или нечетная… настоятельно рекомендую изучить предмет прежде чем что то спрашивать.
По указанной ссылке несколько интересных идей. В частности основной DSP перенесен на FPGA, а управление и математика реализованы внешним процессором — в данном случае Raspberry Pi, но именно эту часть можно перенести на смартфон! Мне кажется если интегрировать ПЛИС на ваш изумительный девайс то получится отличный комбайн.
Там исходники для DSP (накопление со сбросом, NCO и др.), количество каналов GPS-приёмника достигается копированием готовых блоков. Сейчас у вас универсальный пеленгатор, но он требует высокого уровня сигнала. Если интегрировать каналы GPS то получится усиление от 30dB. А далее фантазия безгранична.
1. По теме топика — пеленгация спуфера. Если это полноценный симулятор, то он полностью повторяет сигнал спутников. Канал в вашем GPS-приёмнике делает то же самое и полученную реплику кореллирует с принятым сигналом. У вас 4 антенны и полностью синфазный сигнал, т.е. доплер и фаза C/A одинаковы у реплик для всех 4 антенн, будет отличаться только фаза несущей. Вроде то же самое что уже реализовано, но работающее с низкими уровнями сигнала и для каждого спутника отдельно!
2. Помехозащищенный GNSS-приёмник.
В современных геодезических приборах уже доходит до 600-800 каналов. на профильном форуме люди посчитали все возможные сигналы (GPS/ГЛОНАСС и т.д. на всех частотах на всех кодах для всех спутников) и получилось менее 200. Производителей поспешили обвинить в «продаже мегапикселей», но совершенно необоснованно:
— каналы также могут использоваться для поиска гармонических помех;
— каналы могут отслеживать локальные максимумы отраженных сигналов, т.е. несколько каналов для одного спутника, а далее выбирается наиболее достоверный;
С нормальными отраженками всё достаточно просто — прямой сигнал всегда короче и приходит самым ранним (даже если отраженка мощнее), а в случае со спуфером это может быть не так. Поэтому имея 4 антенны и запеленговав спутники станет понятным — если они имеют одинаковые полярные координаты El/Az, да ещё Elevation чуть над горизонтом — что-то с ними не так. Высчитав полярные координаты из эфемерид можно детектировать какой кореллятор выдаёт сигнал от настоящего спутника, а какой от спуфера.
3. Attitude Sensor — это уже реализовано многими компаниями, 2-3 антенны ставятся в матрицу с разделением около полуметра и далее по разнице фаз считается пространственная ориентация.
Но моих сил уже не хватает. Нужны помощники.
Большое спасибо за замечательный комментарий!
2. Любой приёмник тоже _симулирует_ (имитирует) полную реплику сигнала, именно поэтому удаётся выделить сигнал из шума. И когда я пишу про измерение фаз в GPS_канале я пишу про измерение _фазы реплики_ (кода или несущей в зависимости от контекста)
3.
Когда говорят о фазе в GPS сигнале то подразумевают фазу на 1.023 MHz или 10.23 MHzЭто _фаза кода_ которую обычно называют псевдодальностью.
Сигнал от спутника можно увидеть только тогда когда получим отклик от корреляционного приемника.Сигналы от спутника и спуфера не могут совпадать, иначе нас не перекидывало бы во Внуково. Фаза (кода) и фаза (несущей) у них разные.
В обычном приёмнике происходит поиск конкретного сигнала (PRN*L1) и затем кореллятор, уцепившись за максимум, при помощи PLL пытается на нем удержаться. В случае со спуфером мы можем не останавливаться на достигнутом, а задействовать второй кореллятор и искать тот же спутник с другими сдвигами PRN и L1, найти второй максимум и т.д.

Понятно что для некоторых спутников в зависимости от их положения и симулироемой позиции эти максимумы могут совпасть, но для большинства спутников будут раздельные пики.
Ищем первым каналом максимум, включаем режим слежения. Во втором канале начинаем перебирать смещения от 1 до 1023 чипа и ищем следующий максимум и т.д. В результате у нас есть две псевдодальности, из которых мы не знаем какая корректная. То же самое относится к навигационным данным (ведь спуфер может поиграться с ними).
Как отделить корректные дальности от симулируемых я писал выше — отсеивать по пеленгатору, либо запускать в общее уравнивание разные комбинации и т.д.
Навигационные данные точно такие как и в настоящем сигнале. GPS приемник зацепится за больший пик. То что «начинаем перебирать смещения от 1 до 1023 чипа» это стандартный режим поиска (то когда GPS приемник тупит), после нахождения наибольшего пика этот режим больше не используется.
Это довольно идеализированная картинка и именно её я имел в виду когда отвечал. Эти два пика отличаются, где настоящий а где сим., с точностью до одной константы по всем спутниками, т.е. различить по пеленгу невозможно.Это вполне реальная картинка.
Возьмите два RINEX-файла, например из Звенигорода и Менделеево, и сравните разницу дальностей по каждому спутнику — это далеко не константа. С фазовыми дальностями то же самое.
1. GPS-антенна через сплиттер на два кабеля
2. Один кабель длиной 1 метр, второй кабель бухта 300м
3. Заведите их в смеситель (например от спутниковых тарелок)
4. Получится ровно то что вы описали — расстояние между локальными максимумами по всем спутникам одинаковое за счет одинаковой задержки в кабеле, т.е. нарисованная мной картинка одинакова для всех спутников.
Вопрос — какие координаты покажет приёмник?
Если зацепится за первые пики то покажет координату антенны.
Если зацепится за вторые пики то покажет координату антенны (от первого решения он будет отличаться только в dT, который нам малоинтересен).
Вывод: что же это за спуфер такой, который подсовывает нам наши же координаты, в чем смысл? ))
Более того, даже у MEMS за 200 тысяч рублей через 15 минут после калибровки уход уже ужасающий. Если вы сможете продемонстрировать на MEMS с приемлемой ценой решение, выдерживающее хотя бы минуту точность 0.15 градуса — мы вас купим с потрохами.
Такое впечатление, что вы из Красноярска. И судите по красноярскому угломеру. :-)
P.S. Если не в Питере — наверное могу в личку кинуть фото платы.
Все устройства в тракте линейные, включая фильтры-корреляторы, поэтому даже по их выходу фаза сигнала остается невредимой.
Спасибо, полезное (для меня) пояснение. У меня раньше были противоречия — почему и как фаза (точнее разница фаз между спутниками) сохраняется при переводе на IF. Когда ещё был жив форум gps-info туда зашел человек с профильным образованием, я задал ему этот вопрос, ответ был краткий «а что с ней сделается» )) Пришлось взять на веру.
это сугубо нелинейное ус-во. Какая может быть линейность между шумоподобными битовыми последовательностями и отдельным тычком (выход кор.)?
Пеленг был бы ОДНОЗНАЧНО возможен если бы напрямую принимали 1575.42 MHz как со спутника так и симулятора. Со спутника это невозможно, в некоторых случаях (пока сигнал выше теплового шума) возможна пеленгация симулятора. Все.Почитайте откуда в приёмниках берется фазовая дальность с сантиметровой-миллиметровой точностью, при том что уровень сигнала ниже уровня тепловых шумов и измерять вроде как нечего. Потому-что мы ходим по кругу.
RTKLib – Сантиметровая точность GPS/ГЛОНАСС в пост-обработке
Сам я не фанат RTKLib т.к. интерфейс сложный, не для поля, и не поддерживает мой любимый чип SirfSTAR III/IV. С ними у меня тоже получаются сантиметры в постобработке, благо станций вокруг Москвы достаточно.
как писал ранее аппаратная точность измерения псевдодальностей около 3 метров, это в идеале. Это значит что в одном приёмнике она может быть на 3 метра больше, в другом на 3 метра меньше. Они гуляют в зависимости от чего угодно — разные АЦП, разные осцилляторы, разная температура, разные стабилизаторы напряжения, разные наводки на RF-тракт.
Вы как-то писали про пересечение сфер, так вот сферы _никогда_ не пересекаются в одной точке (если количество спутников 5 и более), это объёмная фигура, которая постоянно меняется и живет своей жизнью. Где-то внутри неё за счет фильтра Калмана выбирается оптимальное решение.
Любое решение геодезической задачи есть величина вероятностная. Говоря о координатах всегда говорят «с такой-то точностью», например широта такая-то одна сигма 3 метра — значит с вероятностью 67% наша широта находится в пределах плюс-минус три метра от вычисленной величины; если мы хотим быть уверены с вероятностью 99% то нужно умножать это значение на 3. Вот вам и десять метров.
Вы повторили опыты 90-х, тогда некоторые исследователи тоже считали что координаты антенны на базе и на удаленном ровере должны «плавать» одинаково и коррекцию можно передавать в виде dLat и dLon. Теория, опыты и здравый разум быстро показали ошибочность тезиса и пришлось пилить DGPS, а впоследствии с ростом мощи контроллеров перешли на RTK т.е. фазовые измерения.
Естественно в излюбленном миллиметровщиками NEO-6M такой частоты нет, Вы утверждали что там не 3 метра а все 18 метров.В той теме я не утверждал, а обсуждал/сомневался. Я не зря написал там про усреднение, при дальнейшем штудировании учебников это подтвердилось (точнее не усреднение, а фильтр для delay-locked loop).
www.aholme.co.uk/GPS/Main.htm
Цифровой xor вместо умножителя и sign(sin(wt)) означают очевидную вещь — у него однобитный АЦП, с чего собственно и начался этот холивар.
Если однобитный АЦП то и sign(sin(wt)) для XOR должны быть однобитными, и естественно никак не sign(sin(wt))
Если однобитный АЦП то и sign(sin(wt)) для XOR должны быть однобитными, и естественно никак не sign(sin(wt))Оговорки в документации всегда бывают (имел в виду одно, написал другое — как реализовано в FPGA), лично мне схема этого однобитного приёмника более-менее понятна — взаимозамена аналоговых [-1,1] и логических [0,1], что сумматор по сути инкрементатор/дискриминатор на единицу и пр.
Это уже ловля блох и оффтоп в оффтопе.
У чипа SiRF Star IV фаза есть «из коробки».
Описание протокола ищется по ключевой фразе «Sirf Binary Protocol», он полностью открыт. Четвёртый сёрф кроме того поддерживает новый «One Socket Protocol (OSP)».
У сёрфов есть особенность, которуя я не видел ни в одном другом приёмнике — встроенные часы дрейфуют by design, доплер сдвинут по частоте на номинальную величину 96.25 kHz, соответственно псевдодальности могут иметь совершенно неприличные значения по 100 тыс.км )) Тем не менее навигационная задача решается, а сырые данные спокойно обрабатываются проф.софтом (Topcon Tools, GNSS Solutions и др.). Причины подобного решения неизвестны.
uBlox, который разделяет потребительский и проф.сегменты
uBlox делает приемники геодезического класса? А есть графики остаточных уклонений кода и фазы на статике (лучше на нульбазе)? Когда-то он очень сильно проигрывал полупрофессиональным приемникам, но может с тех пор улучшился?
доплер сдвинут по частоте на номинальную величину 96.25 kHz,Глянул в протокол — доплер у них беззнаковый. То есть просто сдвинули ноль.
соответственно псевдодальности могут иметь совершенно неприличные значения по 100 тыс.км ))На старте или после некоторого времени? Если второе — это они так подкручивание местной шкалы времени компенсируют. Если первое — то запас на уход часов для той же подстройки местной шкалы.
uBlox делает приемники геодезического класса?Проф.применение не ограничивается геодезическим классом, есть, например, ГИС-приёмники (в России практически не присутствуют), в которых используются как SiRF, так и uBlox.
Линейка приёмников Trimble Juno — использовали третий сёрф без фазы (на тот момент был единственный энергоэффективный чип с сырыми данными), далее у этих чипов приключился EOL, перешли на uBlox, у которого либо есть сырые данные, либо нет, пришлось брать дорогую версию, далее приключился сёрф-4, перешли опять на него т.к. цена несоизмерима )
графики остаточных уклонений кода и фазы на статикетипичные для одночастотника, плывут, чем больше расстояние до базы и чем ниже спутники — тем быстрее. После увиденного сразу понятно древнее ограничение на маску 15°
типичные для одночастотника, плывут… извиняюсь, имеется в виду SiRF
Проф.применение не ограничивается геодезическим классом
Что-то я не понимаю, причем тут применение? Если мы для профессиональной работы используем бытовую табуретку, она что, сразу становится профессиональным офисным стулом? :-)
Для меня профессиональные приемники — это геодезия и наземный сегмент. Полупроф — это все, что зарегистрировано как средство измерения. А все остальное — обычные бытовые приемники.
{kind=link}
типичные для одночастотника, плывут, чем больше расстояние до базы и чем ниже спутники — тем быстрее.Систематика? Ну это совсем дерьмово. Видимо я видел только нетипичные одночастотники, то есть без систематики.
Систематика? Ну это совсем дерьмово.Я имел в виду плывут невязки по фазе, как у любого одночастотника. Статических погрешностей не заметил. Если имеется в виду шум в фазовых измерениях — естественно он есть. Но если вспомнить девяностые и нулевые то всё не так плохо, учитывая цену ))
Обсуждение
Раньше проф. и полупроф-приёмниками считалось всё что умеет выдавать сырые данные для постобработки, у иностранцев свой взгляд на эти вещи, им Росреестр как-то побоку (да и мне тоже). Trimble Juno, Ashtech MobileMapper у иностранцев считаются GIS Grade.
Сегодня это умеют делать даже смартфоны на Android 7, поэтому рамки сдвигаются и одного лишь наличия сырых данных уже недостаточно.
{kind=link}
Уверен в России у Juno тоже имеется сертификат, просто не вижу смысла искать, для меня всего лишь хобби.
Я имел в виду плывут невязки по фазе, как у любого одночастотника
Ну а теперь взгляните на полупроф от создателей геодезического приемника. Он, вообще-то двухчастотник, но я специально считал только по L1. Снято, разумеется, на нульбазе.



Теперь сравним. У полупрофа СКО шума фазы — 0.006 цикла. СКО шума кода — 0.16 метра.
У вашего любительского — СКО шума фазы 0.04 цикла. Что c кодом — непонятно. Плывет… — ну тот, что красным — это явная многолучевость. Остальное может и систематика, но я её в расчете СКО не брал.
Раньше проф. и полупроф-приёмниками считалось всё что умеет выдавать сырые данные для постобработки,Выдавать — мало, надо чтобы RTK устойчиво работал. А это означает многогодовое вылавливание блох. И в приемнике, и в третичной обработке.
у иностранцев свой взгляд на эти вещи, им Росреестр как-то побоку (да и мне тоже).У них свои сертификаты на полуфпроф. Ну вот то, что сейчас на боинги ставится. Видите сертификаты FAA TSO C145 Class Beta-3, EUROCAE ED-14C? А вот ещё один, тоже авиационный — и опять сертификаты TSO. Аналогично с морскими приемниками.
Сегодня это умеют делать даже смартфоны на Android 7,А что с качеством? RTK стабильно работает?
Я имел в виду плывут невязки по фазе, как у любого одночастотника.
Если вас не убедили предыдущие картинки (все-таки двухчастотник), то могу попросить разрешения кинуть картинки от одного ещё не вышедшего бытового одночастотника. Реально бытового — цена версии с обрубленным выходом фазы — 890 рублей, с фазой будет рублей на 500 дороже.
Характеристики по вчерашнему замеру:
- СКО шума фазы — 0.02 цикла
- СКО шума кода — 0.25 метра
- уплыв фазы — 0.05 в час
Но это явная бытовуха — слипы, в том числе полуцикловые. Уйдут слипы на стопе, исправятся баги — можно будет рассматривать как полупроф.
Но это такая, хорошая бытовуха. То есть явно лучше sirf star.
Но это такая, хорошая бытовуха. То есть явно лучше sirf star.У SiRF Star было одно неоспоримое преимущество над всем существовавшим до этого и существующими сегодня бытовыми чипами — он уже встроен в PDA. У меня цели были немного иные — дать любителям, в т.ч. студентам, простой способ собрать RINEX.
PS: полагаю не совсем корректно сравнивать чипы из разных десятилетий.
Чипы? Вы шутите? Почти геодезический приемник от НииКП — это плата 6 на 6 см, с потреблением порядка 10 ватт (3 питающих напряжения) и несколькими сотнями деталей под экраном. Фото, видимо, могу только в личку. Но для понимания — это как пара Навиор-24 (он же 4701) на одной плате. Ну вот фото навиора, для понимания уровня.

Так что не чипы определяют класс приемника. Можно и на рассыпухе 20летней давности делать хорошие приемники.
Что касается элементной базы непосредственно приёмников — думаю вы знаете что в «про» и «непро» используются DSP разного порядка. У того же бытового сёрфа ADC 16MSPS x 1.5-2 bit, у тримбловской платы это легко 125 MSPS 10-12 bit (даже в одночастотном режиме, если опция не куплена), отсуда требования к DSP и энергопотреблению. Как вообще можно их сравнивать? Так что рассыпуха рассыпухе рознь.
Да ещё я забыл указать что у четвёртого сёрфа характеристики должны быть лучше. Но сомневаюсь что он годится для компаса с малой базой. Если разносить антенны бак-корма или хотя бы по разным бортам судна — другое дело.
Дело не в аппаратной базе, а в качестве алгоритмов. Навис 10-15 лет отлаживал алгоритм раздвижки колец слежения за кодом и фазой. Это очень простой эксперимент — ставим приемник на на 15 минут, потом резко тыкаем в него палкой. Ну скажем движение на метр за полсекунды. И тут есть три варианта:
- большой шум фазы на стопе, то есть кольца не зажаты
- малый шум фазы на стопе + слипы при начале движения, то есть не успели разжать кольца
- малый шум фазы на стопе и нет слипов при начале движения, то есть работающая автоматика разжатия колец
Ещё пример. Едем в ночь с субботы на воскресенье на машине с бытовым навигатором (скорее всего там SiRF). Ровно в полночь по Гринвичу координаты прыгают на 150 метров. Причина простая — смена недели GPS, расчет эфемерид идет неверно. Через пару минут пришли новые эфемериды и все стало нормально.
Ещё пример. Мобильник выдал координаты, смещенные на 300 км (неверная эпоха кода) от истинных. Угу, это было 2D-решение. Для бытовухи — нормально, для полупрофа — нет.
В любой бытовухе таких ляпов — как грязи. В полупрофах — баги есть, но мало. А в геодезических приемниках — ну попробуйте, найдите.
Но сомневаюсь что он годится для компаса с малой базой. Если разносить антенны бак-корма или хотя бы по разным бортам судна — другое дело.С моей точки зрения — наоборот. На базе меньше половины длины волны — вообще будет работать любой приемник с фазой. А чем база больше — тем больше требования к качеству фазы для разрешения неоднозначностей по одной эпохе. Корабль у нас движется (и качается), так что разрешаться на стопе мы не можем. А чем меньше площадь сферы (в центре база, на сфере ровер) — тем проще разрешить неоднозначности при том же качестве фазы.
Ну а второй момент — многолучевость на баке и юте существенно разная, ибо между ними надстройка. Поэтому вешаем на мачту и повыше.
Как анекдот — некие горе-установщики разместили антенны под марсовой площадкой. С полной потерей прямого приема сигнала спутников, разумеется.
Если кинете пару часовых RINEX на нульбазе — то посмотрю, годится ли SiRF. Сплитер у вас есть, чтобы на нульбазе мерять?
Почитайте блог проектировщиков небоскреба в Питере, там есть про это целая статья.
В 1993 году я работал с проф.приёмниками Trimble, а далее в высокоточной навигации (Multireference DGPS, это когда дифпоправки не от одной станции, а от нескольких). Причем всё настраивалось вручную и анализировалось, какую станцию оставить, а какую выкинуть. f-test, w-test — все дела. Про IODE знает любой кто работал с коррекциями RTCM 2.x, с появлением GCDGPS всё это стало не нужно.
Поверьте я тоже что-то знаю и не с потолка беру свои мысли. Жаль что беседа приобрела такой характер.
Я полностью согласен что уровень знания систем GNSS сегодня очень низок, поэтому не виню вас в скепсисе по поводу моих сообщений. Раньше любой геодезист или гидрограф знали основы, а сегодня, т.к. всё работает стабильно, просто нажимают кнопки.
И посмотреть что рисует u-center на карте от каждого из идентичных GPS приемников запитанных от ОДНОЙ антенны проводниками кратчайшей длины. Разброс по карте будет далеко не метровый… Возможно вот дозрею, сделаю статью здесь по одновременной работе GPS от одной антенны и как это реально выглядит на карте.
Охота на кремлевского демона