Сегодня уже трудно найти человека, который не знает, что такое навигатор и GPS-координаты. В этой статье мы расскажем о том, как встроить функции навигатора в устройство, собранное на базе микрокомпьютера Repka Pi. Для получения координат мы будем использовать модуль GSM/GPRS/GNSS Bluetooth HAT, о котором вы уже знаете из предыдущих статей нашей серии про эти модули на базе SIM868.
Полученные GPS-координаты вы сможете использовать в устройствах IoT, роверах, самокатах, дронах, автомобилях, в шлагбаумах, воротах и так далее.
Вы научитесь получать от модуля сообщения NMEA в формате передачи данных между корабельными приборами. Этот формат часто применяется при интеграции навигатора с различными устройствами, которые должны получать и отслеживать данные о местоположении, направлении, скорости, параметры навигационных спутников и другие данные.
Контролируя GPS-координаты своего устройства, вы сможете получать сообщения о начале движения или остановке устройства, о вхождении в определенную область, заданную своими координатами или о выходе устройства из этой области. Также можно контролировать высоту, скорость и направление перемещения устройства. Например, можно реагировать на превышение скорости, отправляя сообщение в центр обработки данных.
Если устройств много, то данные о координатах, добавленные в телеметрические данные, позволят сразу понять, где находится то или иное устройство, требующее внимания или обслуживания.
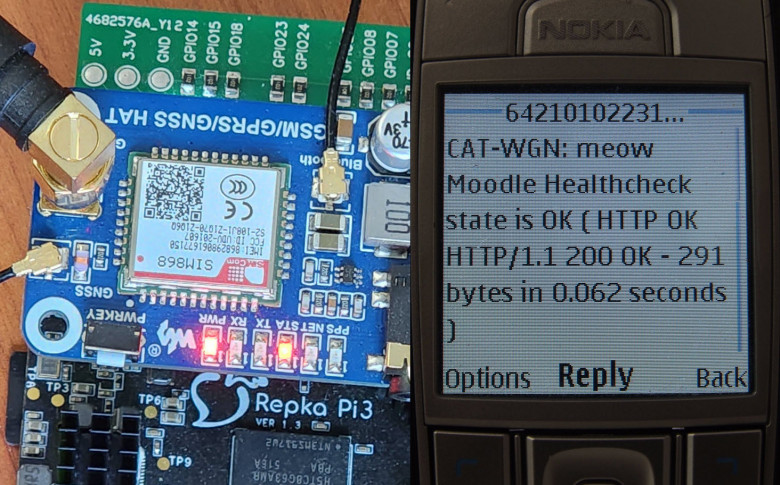
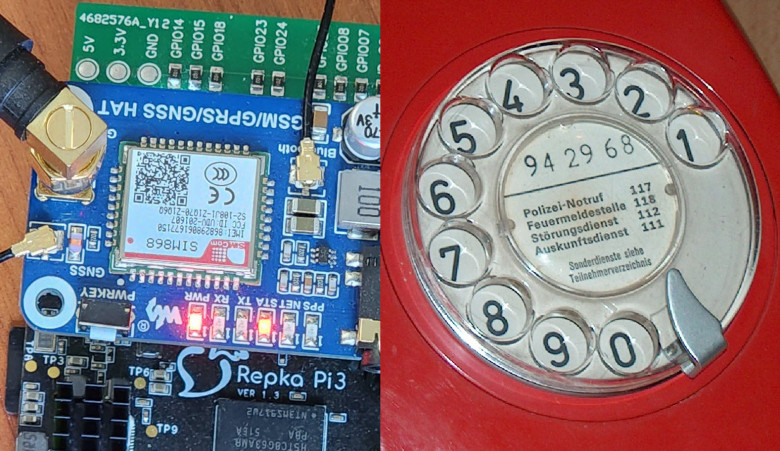
Модуль GSM/GPRS/GNSS Bluetooth HAT может отправлять данные, например, через GPRS или SMS, а также совершать телефонные звонки.