Сегодня поговорим о такой интересной технике оформления стёкол, как витраж, а также попробуем прикинуть, как нам создать его минимальными усилиями!

User
Для генерации изображений сегодня существует множество сервисов. Некоторые из них платные, другие нет. И даже в большинстве бесплатных сервисов вы можете столкнуться с ограничениями, например, на количество бесплатных картинок за единицу времени, разрешение изображений и прочее. Это обстоятельство объясняется просто. Несмотря на доступность технологии, железо, которое требуется для генерации, остается дорогим. И бесплатно отдавать ресурсы GPU мало кому хочется. Однако, тягу к бесплатному трудно победить. Поэтому в этой статье мы узнаем, как, всё же, генерировать изображения только при помощи браузера и нескольких строк кода.

Мир, в котором мы с вами живём и который непосредственно ощущаем, является объёмным: расположение любой точки в нём можно описать тремя координатами, и этот факт элементарно зашит в нашу природу. Чем больше “понимания” система искусственного интеллекта будет иметь относительно истинной сущности вещей, включая их расположение, форму и объем, тем легче она будет справляться с задачами, которые до сих пор мог выполнять только человек.
В этой статье разберём, как ИИ помогает решать одну из ключевых задач робототехники, а именно - понимание и ориентация в объёмных пространствах!

Вы, вероятно, слышали о Тейлор Свифт и очень креативном наборе изображений, созданных одним из её фанатов. Что могу сказать - это был лишь вопрос времени, когда кто-то это сделает. Как мы знаем - не бывает плохой рекламы, однако что если вас зовут не Тейлор Свифт, и никто не создает и не ищет ваши изображения в Google?
Хотя это действительно очень печально, по крайней мере вы можете создать свои собственные изображения. Правда если вы хотите использовать генеративные модели для создания последовательных историй с элементами сюжета, это не так просто, как вам могло показаться. Создать одного-двух персонажа с помощью Dall-e или Stable Diffusion довольно просто. Но что, если вы хотите создать целую историю с одними и теми же персонажами в разных обстановках и стилях? Исследователи генеративных моделей неустанно работают над тем, чтобы упростить для вас процесс создания собственного творческого искусства с вашим любимым актером, но пока что это не так просто.
Так что же мы можем сделать сейчас? Давайте посмотрим.

Прошло 3 года с момента когда я обучал StyleGAN на панельках и мне стало интересно что там сейчас с генерацией картинок. А там - ого - можно дообучить целый stable diffusion на любом стиле любого художника! Как? А вот щас расскажу

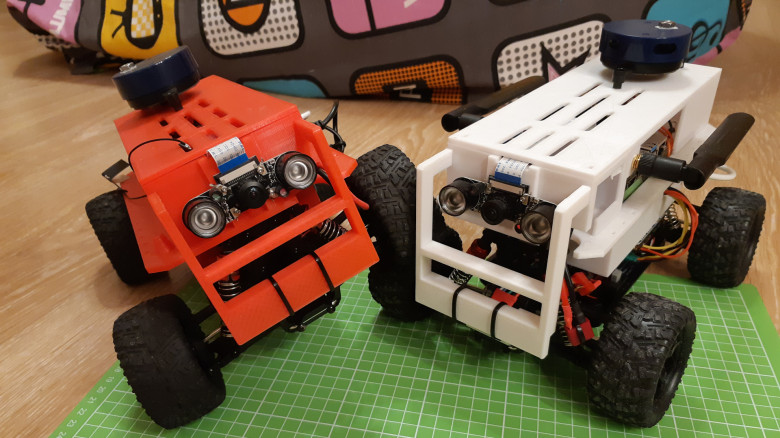
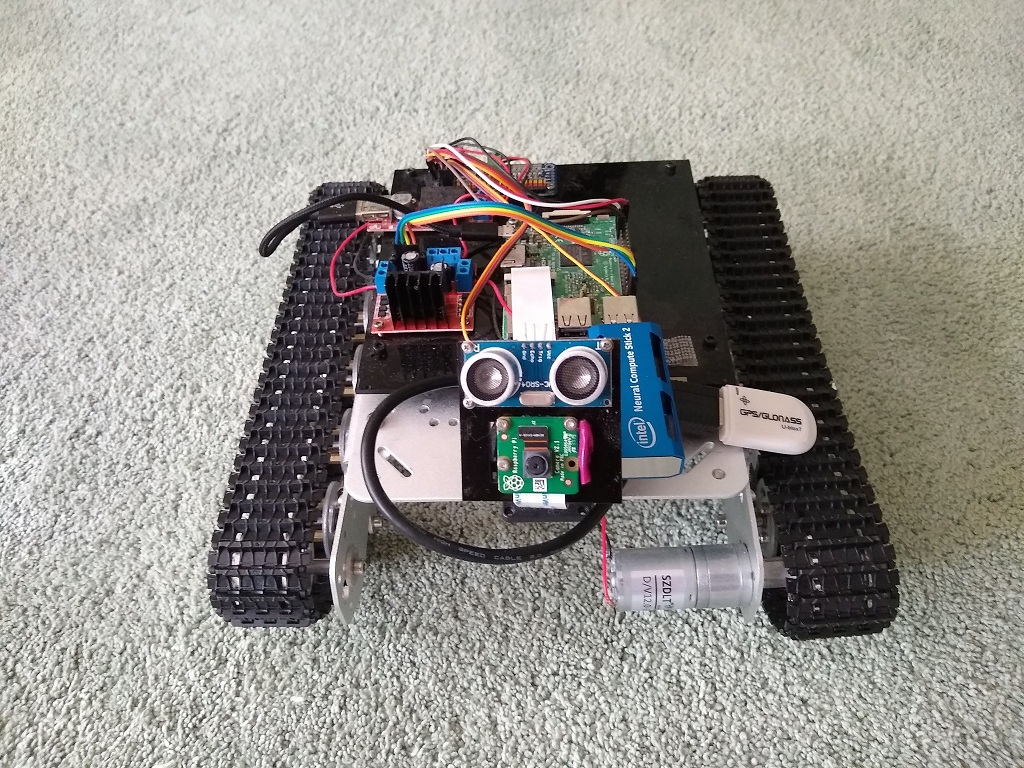
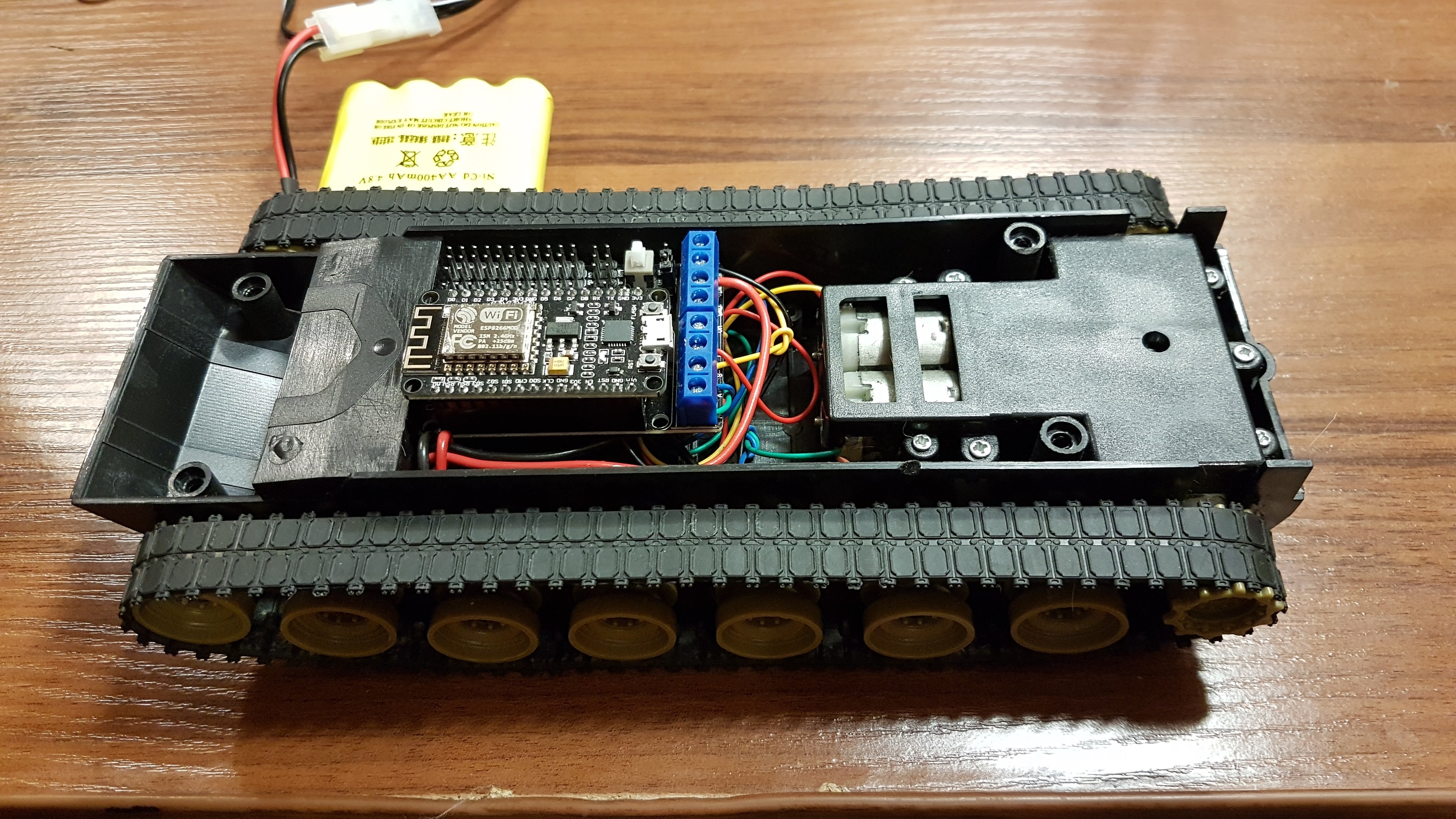
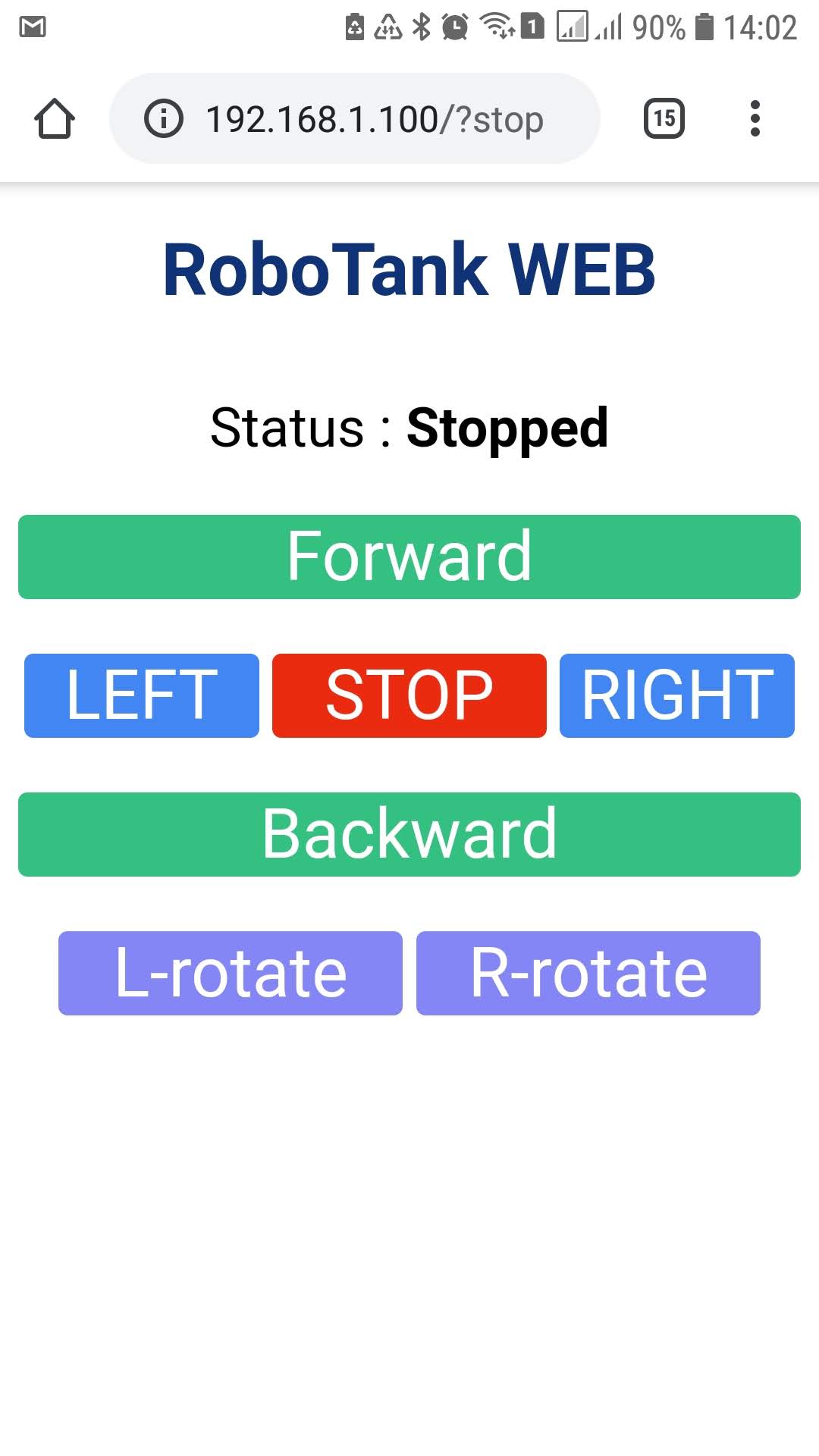
Будем делать вот такой маленький, как на картинке, беспилотный автомобиль.
Рассказ о том, как я его собрал.
Код, список деталей и видео туториал по сборке.

Что делать, когда хочется писать о книгах, но рубеж года уже пройден, а 2021 пока не радует новинками? Можно еще раз вспомнить достойные фантастические романы, которые вышли на русском в 2020, и заслуживают внимания, хотя их авторы, по крайней мере пока, не могут похвастаться большой популярностью в России. Поэтому хочу рассказать о нескольких фантастических книгах прошлого года, которые произвели на меня хорошее впечатление.
Буду рад, если в комментариях поделитесь своими фантастическими находками.

В ноябре 2018 года меня вновь посетила идея создания древа моей семьи. Особенно на это подтолкнула оцифровка архивов Великой Отечественной Войны, в которой я нашел своих предков. До этого я несколько раз пытался записать всё на бумаге (и каждый раз всё терял). Но в этот раз подумал, что нужно подойти к задаче основательно. Я провёл некоторые исследования и решил, что мне нужен свой велосипед. В конце концов я создал минимальный прототип удовлетворяющий моим требованиям, а также сделал несколько выводов. С проделанной работой предлагаю ознакомится и вам.


Полтора килограмма термоядерного Тринидадского Скорпиона я в итоге собрал с одного куста на гидропонике.
У меня было много довольно странных хобби. Некоторые приводили к странным эффектам, вроде массового домашнего производства домашнего порошка для посудомойки. В список к этому странному ряду я решил добавить еще один пункт. Теперь я развлекаюсь еще и с гидропоникой. Причем эффект получился еще более адовый, чем я ожидал.

Тема чудовищно огромная, охватить ее за один пост вряд ли получится, поэтому я постараюсь ограничиться описанием принципа, почему это вообще работает и дать максимально исчерпывающий мануал, чтобы каждый смог из желудей и спичек повторить мой эксперимент. В самом начале будет много теории. Можете ее проскочить и сразу перейти к нужным покупкам, а вернуться к ней позже.

Десктопные/облачные, платные/бесплатные, для SEO, для совместных покупок, для наполнения сайтов, для сбора цен… В обилии парсеров можно утонуть.
Мы разложили все по полочкам и собрали самые толковые инструменты парсинга — чтобы вы могли быстро и просто собрать открытую информацию с любого сайта.
Довольно давно у меня появилась мысль установить управляющую панель, расположенную рядом с входной дверью внутри квартиры/дома.
Существует несколько вариантов реализации этой задумки:
Дополнительное требование, которое сразу ограничило выбор устройства: на панель управления автоматически должно выводиться изображение с наружной камеры при срабатывания датчика движения (и только в случае присутствия людей дома).