Программирование роботов — это интересно.
Многие наверное видели японских гуманоидных роботов, или французский учебный робот
NAO, интересным выглядит проект обучаемого робота-манипулятор
Baxter. Промышленные манипуляторы KUKA из Германии — это классика. Кто-то программирует системы конвейерной обработки (фильтрации, сортировки). Дельта роботы. Есть целый пласт — управление квадрокоптером/алгоритмы стабилизации. И конечно же простые трудяги на складе — Line Follower.
Но всё это как правило — не дешевые игрушки, поэтому доступ к роботам есть в специализированных лабораториях или институтах/школах где получили финансирование и есть эти направления. Всем же остальным разработчикам (кому интересна робототехника) — остаётся завистливо смотреть.
Некоторое время назад я вышел на достаточно интересную систему — 3д робосимулятор
V-REP, от швейцарской компании Coppelia Robotics.
К своему (приятному) удивлению я обнаружил, что эта система:
- имеет большой функционал (система разрабатывается с марта 2010 года)
- полностью open-source (выложена в открытый доступ в 2013 году)
- кроссплатформенная — windows, mac, linux (работает на Qt)
- имеет API и библиотеки для работы с роботами через C/C++, Python, Java, Lua, Matlab, Octave или Urbi
- бесплатная для некоммерческого использования!
Все объекты, которые программируются в этой системе — «живут» в реальном с точки зрения физических законов мире — есть гравитация, можно захватывать предметы, столкновения, датчики расстояния, видео датчики и т.п.
Поработав некоторое время с этой системой, я решил рассказать про неё читателям хабра.
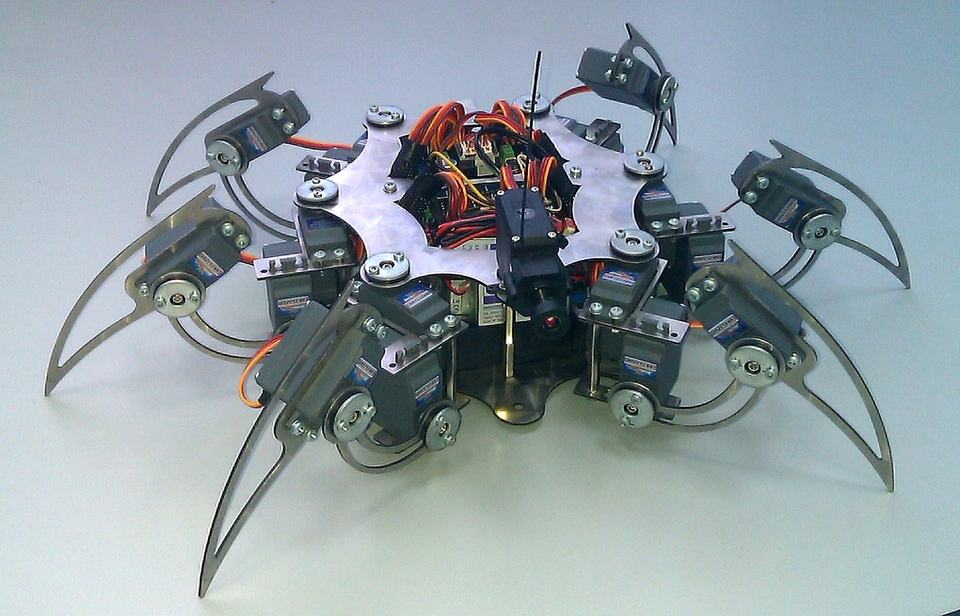
Да, и на картинке скриншот из V-REP, и модели роботов — которые вы можете программировать, и смотреть поведение, прямо на вашем компьютере.