Детектирование и отслеживание множественных объектов в видеопотоке на FPGA
16 мин

В этой статье я хочу рассказать о реализации системы обнаружения и отслеживания множественных объектов в видеопотоке. Данная статья базируется на двух предыдущих: Детектирование движения в видеопотоке на FPGA и Фильтрация изображения методом математической морфологии на FPGA. Захват и первичная обработка изображения осуществляется при помощи методов, описанных в первой статье, а фильтрация изображения описана во второй.
Следуя целям, поставленным в первой статье, я решил реализовать алгоритм отрисовки рамки вокруг обнаруженного объекта. В процессе выполнения этой задачи, я столкнулся с вопросом: а вокруг какого именно объекта надо рисовать рамку? Объектов, попавших в кадр после фильтрации, может оказаться множество: одни из них маленькие, а другие большие. Если рисовать одну рамку вокруг всех объектов, попавших в кадр, то это делается не сложно, но результат работы такой системы вряд ли кому будет интересен.
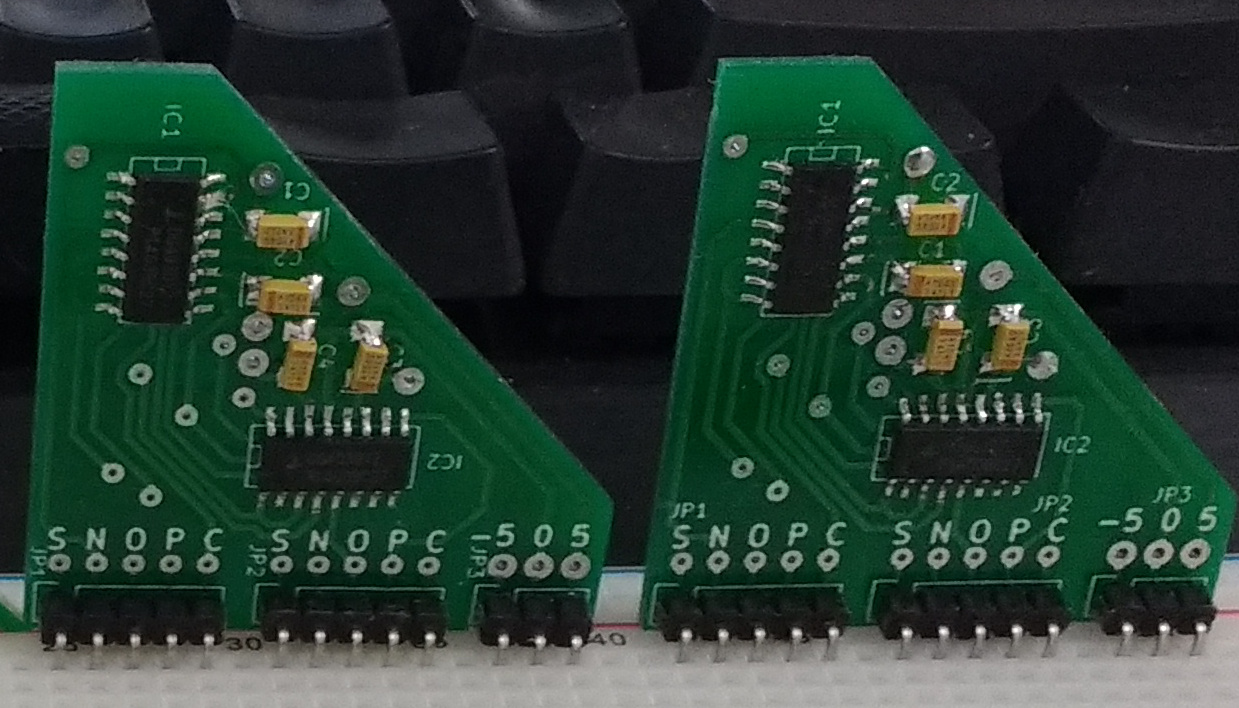
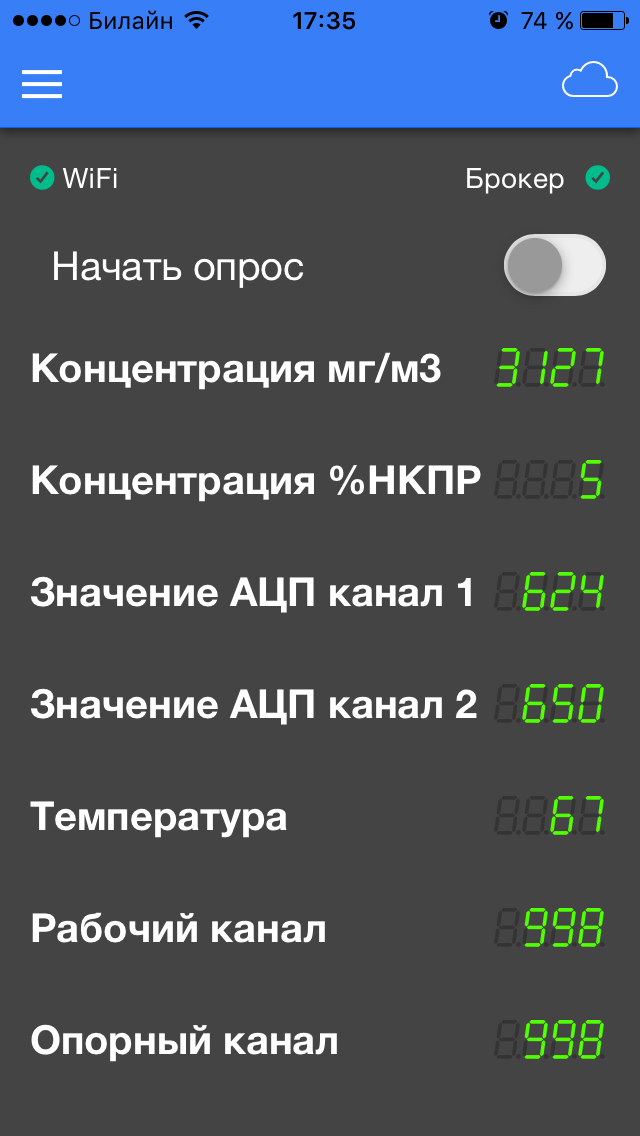 Как говорится, лень — двигатель прогресса. Для облегчения жизни сейчас делаю себе небольшое устройство в виде модуля ESP8266 и преобразователя RS485 для связи с датчиками-газоанализаторами по протоколу Modbus. В производстве постоянно возникает необходимость подключаться к приборам для выполнения различного рода диагностики по 485 интерфейсу, но каждый раз тащить с собой ноутбук неудобно, а вот мобильный телефон всегда в кармане.
Как говорится, лень — двигатель прогресса. Для облегчения жизни сейчас делаю себе небольшое устройство в виде модуля ESP8266 и преобразователя RS485 для связи с датчиками-газоанализаторами по протоколу Modbus. В производстве постоянно возникает необходимость подключаться к приборам для выполнения различного рода диагностики по 485 интерфейсу, но каждый раз тащить с собой ноутбук неудобно, а вот мобильный телефон всегда в кармане.
 Существует множество библиотек графического интерфейса для микроконтроллеров и встраиваемых систем, но многие из них имеют ограниченный функционал, сложность в использовании и интеграции, необходимость обязательного использования внешней оперативной памяти, а некоторые стоят больше, чем ваш проект целиком. Из-за этих причин и многих других было решено писать свою библиотеку.
Существует множество библиотек графического интерфейса для микроконтроллеров и встраиваемых систем, но многие из них имеют ограниченный функционал, сложность в использовании и интеграции, необходимость обязательного использования внешней оперативной памяти, а некоторые стоят больше, чем ваш проект целиком. Из-за этих причин и многих других было решено писать свою библиотеку.