Ratings Service — это online-сервис, который позволяет узнать рейтинг фильма по его названию.
Отличительные особенности:
поиск по нескольким Интернет-базам одновременно (на данный момент это КиноПоиск.Ru и КиноКопилка.ру)
легкий интерфейс; можно пользоваться с мобильного телефона, например, через Opera Mini
возможность получать результаты выборки в формате XML в стиле REST
хостинг на Google App Engine / Java
Open Source
Я бы хотел рассказать о некоторых особенностях реализации и поделиться впечатлениями работы с Google App Engine / Java. Ниже вы также найдете адрес проекта на Google Code, с выложенными исходными кодами.
пользователи загружают видео на YouTube, не уходя с вашего сайта
можно загружать не только видео, но и фото материалы
вы модерируете то, что загружается с вашего сайта (без этой опции сервис, наверное, и не смог бы существовать)
в YouTube рядом с видео будет ссылка на сайт, с которого оно было загружено
Платформа изначально была ориентирована на взаимодействие СМИ с репортерами-любителями, но, думаю, есть еще много интересных способов ее использования.
Подробнее можно прочитать на странице проекта.
Решение сделать собственную клавиатуру пришло после анонса клавиатуры Truly Ergonomic. Всё в ней было прекрасно, кроме цены. 220$+50$ за доставку несколько превышало психологический порог стоимости доски с кнопками.
Здравствуйте!
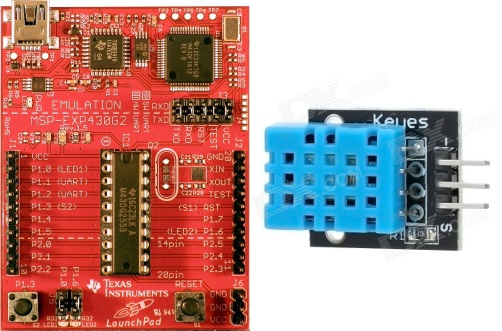
Недавно приобрел MSP430 LaunchPad и стал изучать документацию в надежде когда-нибудь применить в быту. В этом сообщении опишу получение влажности и температуры с датчика DHT11.
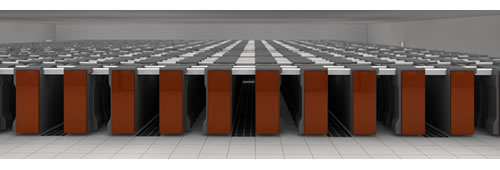
Fujitsu и крупнейший в Японии научно-исследовательский институт RIKEN начали сборку суперкомпьютера с предполагаемой производительностью 10 петафлопс (1016, то есть 10 квадриллионов операций в секунду). Название “K” соответствует японскому слову “Kei”, что обозначает 1016.
Для сравнения, сегодняшний лидер мирового рейтинга суперкомпьютеров имеет производительность всего 1,76 петафлопс, а самый мощный российский суперкомпьютер — 0,35 петафлопс.
Конструкция будет включать более 800 серверных стоек и более 80 000 процессоров Fujitsu SPARC 64 VIIIfx 2,2 ГГц (производительность 128 гигафлопс каждый) с водяным охлаждением.
Это статья была написана для людей, которым всегда интересно знать как работают разные вещи. Для тех разработчиков которые обычно пишут свои программы на высоком уровне, C, C++ или Java — не важно, но при этом столкнулись с необходимостью сделать что-то на низком уровне. Мы будем рассматривать низкоуровневое программирование на примере работы bootloader-а.
Мы опишем что происходит после включения компьютера и как система загружается. В качестве практического примера, рассмотрим как вы можете написать свой собственный загрузчик, который фактически является отправной точкой при загрузки системы.
Для разработки системы управления одной железякой после длительных поисков мною был выбран ARM-микроконтроллер семейства STM32 — STM32F103 (в «стоножечном» исполнении). А в качестве макетки для разработки и отладки — STM32P103 (там ножек хоть и меньше, но ядро то же самое). «Истории успеха» я понемногу выкладывал в своей ЖЖшке, но вот решил собрать все воедино и рассказать о том, каково же оно — программировать микроконтроллеры в линуксе. Сам проект лежит на sourceforge.
Для покупок на ebay-подобных околоазиатских сайтах могут быть разные причины от острого, свербящего желания получить часы «как в Portal 2» до банальной лени, стоящей на пути между диваном и торговым центром. Среди них и желание сэкономить, и острая хроничесекая интернет-шоппинг-зависимость типа моей. Ну и, конечно, ни с чем несравнимая эйфория после победы финального босса – тётечки из окошка Почты России. Она сначала пытается измотать вас 20-минутной очередью под «Ласковый май» в уютном отделении почтовой связи, а потом запросто может попросить дописать на обратную сторону извещения код подразделения, выдавшего паспорт, но не спросить сам документ, за которым только что пришлось возвращаться с полпути до почты по причине собственной забывчивости.
Так, о чём это я? Ах, да, о ещё одной торговой интернет-площадке и тонкой, незримой связи её с OCR.
Что такое ARM NEON? – ARM® NEON™ это SIMD движок … – другими словами это расширенный набор инструкций наподобие x86 CPU SSE/SSE2 но для процессоров с ARM архитектурой.
Зачем?
Всё и так было хорошо пока я не добавил поддержку FSAA. После этого фпс просел ниже чем 15.
После оптимизации у меня опять было около 25 FPS. Но в памяти засела одна функция которая потребляла 10% времени на кадр в которой я уже не знал что можно оптимизировать.
Благодаря одному моему другу, который время от времени задавал вопрос типа «А не хочешь ли ты задействовать NEON в своем движке» я таки решился (с его поддержкой) переписать эту функцию на NEON.
Понадобилось нам однажды измерять температуру и влажность в одном помещении, несложная задача, стоит обратиться в гугл и там до кучи примеров на ардуино как это сделать, скетчи, схемы и пояснения. Простые задачи подобного рода возникают достаточно часто и каждый раз модифицировать код для контроллера не хотелось. Мы подумали, а что если написать что-то типа интерпретатора для микроконтроллера(МК), который бы принимал команды и выполнял их. Таким образом отпадает необходимость писать софт каждый раз для МК, это занятие требует времени зачастую больше, чем под ПК из-за того, что объем памяти МК ограничен и не попользуешься развитыми средствами типа regex и прочего. Интерпретатор должен быть расширяемый, то есть добавление новой команды, не должно быть зубодробительной операцией. Также в будущем он должен быть легко переносим на ARM Cortex-M3 архитектуру и способен работать через различные интерфейсы связи будь то RS485, Ethernet, ZigBee.
На основании этих требований было решено разработать такое устройство и + библиотеки для работы с ним под несколько языков (сейчас Python и GCC C/C++) и ОС ( Win и Linux) чтобы не париться больше с написанием каждый раз софта для контроллера, который делает рутину — собирает данные или что-то включает или выключает.
Открыть новую закладку, скопировать в адресную строку
data:text/html, <html contenteditable>
и нажать Enter.
Вуаля.
При клике на белом поле появляется курсор, и можно писать мысли, заметки, наблюдения. Романы, стихи…
Можно печатать написанное, можно сохранять в текстовый файл (для корректного сохранения русского языка необходимо сначала выставить правильную кодировку у страницы).
Начиная упражнения с серией микроконтроллеров msp430 сразу обратил внимание на мизерные потребления энергии в дежурных (low power mode) режимах. Всегда хотелось собрать максимально автономный радиотермометр, чтобы прибить его гвоздями к дереву напротив дома и максимально уменьшить влияние выходящего из дома тепла на точность показаний. Радиотермометр на батарейках, даже если их хватает на годы — тоже не особо гуд, лазить на дерево с целю замены батарейки не всегда здорово, особенно в плохую погоду. Решил попробовать схему питания от солнечных батарей.
На данный момент происходит лавинообразное увеличение числа мультимедиа-ресурсов, в частности изображений. Как следствие, возрастают требования к средствам систематизации и поиска подобных ресурсов. Большинство существующих на данный момент систем,
осуществляющих поиск информации по описанию (англ. Description-Based Image Retrieval, DBIR), уже не могут в полной мере удовлетворить потребности человека. Поэтому все больше растет интерес к поиску объектов по содержанию (англ. Content-Based Image Retrieval, CBIR).
Следует отметить, что во многих сферах деятельности пользователю приходится сталкиваться с изображениями человеческих лиц: начиная от стремительно развивающихся социальных сетей и заканчивая областью криминалистики. И хотя к данной задачи применимы общие методы поиска и классификации, она требует более высокой точности решения. Подобное требование объясняется, по большему счету, сложностью строения самого лица и множеством деталей, затрудняющих выделить общие типы лиц (родинки, прически, растительность на лице и т.д.). Вполне естественно, что требование к точности результата ведет к повышению вычислительных затрат алгоритмов поиска и распознавания лиц.
Добрый день, уважаемые хабровчане. Это вторая часть статьи про разработку робота-хексапода. Первую часть вы можете найти тут.
В этой статье я расскажу непосредственно про производство самого робота, переход от моделей в SolidWorks к реальному устройству.
В этой статье я расскажу, как самому написать процессор на VHDL. Кода будет не очень много (я, по крайней мере, надеюсь на это). Полный код выложен на гитхабе, и там же, можно посмотреть несколько итераций написания.
Алгоритм Particle Filter замечателен своей простотой и интуитивной понятностью. Предлагаю собственный вариант его использования в задаче стереоскопического зрения для сопоставления «одной и той же точки» на двух изображениях — с левой и правой камеры. Для реализации (исключительно в целях развлечения) использован Python с библиотеками numpy (матричные вычисления) и pygame (графика и обработка событий мышки). Сам алгоритм Particle Filter без изменений взят из курса Programming a Robotic Car на Udacity. Меня извиняет лишь то, что я честно прослушал весь курс и сделал все домашние работы, включая и реализацию этого алгоритма.
В задаче стереоскопического зрения нужно сопоставлять малые области (например, 8х8 пикселей) на левом и правом кадре. При идеальном расположении камер строго горизонтально, зная разность координаты по оси Х одинаковой области между левым и правым кадром, можно вычислить расстояние до объекта, который изображен в этой области. Понимаю, что звучит запутанно, но на самом деле это легко выводится простейшими геометрическими построениями по правилу подобных треугольников. Например, на видео с недостроенной колокольней, мы видим уходящий вдаль забор с одинаковыми ромбами. Ближний к нам ромб наиболее сильно смещен на правом кадре относительно левого, следующий — чуть меньше и т.д.
Стандартная схема решения такой задачи довольно тяжелая в вычислительном плане. Нужно откалибровать погрешности взаимного расположения камер так, чтобы гарантировать, что горизонтальная линия с координатой Y на левом кадре точно соответствует горизонтали с той же координатой на правом кадре. Затем сопоставить каждой точке (или области ) вдоль горизонтальной линии на левом кадре наилучшую точку на правом кадре (это решается, например, методом динамического программирования, имеющем квадратическую сложность). Тогда у нас будут вычислены смещения по Ох для каждой точки вдоль рассматриваемой горизонтали. И повторить процедуру для каждой горизонтальной линии. Немного сложновато, и уж совсем не похоже на то, как это работает в мозге (мы ведь знаем это, правда?)
Посмотрите, как алгорим Particle Filter решает эту же задачу. На мой взгляд, это очень похоже на биологическую модель, по крайней мере имитируются микро-движения глаза для фокусировки внимания на отдельных фрагментах изображения, и учитывается «предыстория» таких микро-движений.
В прошлый раз (почти год назад) мы определяли части речи в русском тексте, производили морфологический анализ слов. В этой статье мы пойдем на уровень выше, к синтаксическому анализу целых предложений.
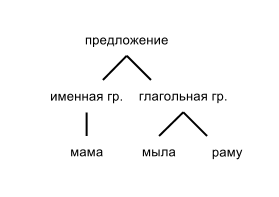
Наша цель заключается в создании парсера русского языка, т.е. программы, которая на вход бы принимала произвольный текст, а на выходе выдавала бы его синтаксическую структуру. Например, так:
"Мама мыла раму":
(предложение
(именная гр. (сущ мама))
(глаг. гр. (глаг мыла)
(именная гр. (сущ раму)))
(. .)))
Это называется синтаксическим деревом предложения. В графическом виде его можно представить следующим образом (в упрощенном виде):
Эта статья описывает процесс создания работающего самодельного светодиода. Долгое время я думал, что создание активных электронных компонентов самому c нуля — неосуществимая задумка. Как же я ошибался. Галеновый (из сульфида свинца PbS. — Прим. перев.) диодный детектор относится к эпохе зарождения радио. Светодиод появился примерно в то же время. Это моя первая (на самом деле вторая, после галена) попытка создания полупроводника.
Применение SURF для создания маркера дополненной реальности
Это продолжение топика о дополненной реальности. Вот здесь первая часть. В обсуждении топика юзером Inco были показаны интересные результаты его работы в направлении распознавании маркера дополненной реальности Видео.На тот момент времени не оказалось, но через пару месяцев мне стало интересно как всё это работает, насколько устойчив подход — и свободные часы нашлись. Представляю вам свою реализацию этой идеи, который вылился в доклад на вот этом событии.
Как уже писали на Хабре, разработчик широко известного в узких кругах Minecraft'а Маркус «Notch» Перссон в данный момент занят разработкой новой игры, действие которой будет происходить в космосе в 281 474 976 712 644 году.
Как и Майнкрафт, игра будет нестандартной: главная «фишка» — полностью эмулируемый процессор, под управлением которого космические корабли и будут бороздить просторы Большого… э, Вселенной. Поскольку персонажи игры в год 0x10C (игра, собственно, так и называется) попали прямиком из 1980 года, то и процессор DCPU-16 по своим характеристикам примерно соответствует той эпохе: 128 килобайт оперативной памяти, 100 килогерц, нехитрый набор команд.
Несмотря на то, что игра находится еще в очень ранней стадии разработки, спецификация процессора уже доступна для ознакомления — и уже формируются сообщества, участники которых разрабатывают множество всяких интересных штук под несуществующую платформу. Ваш покорный слуга — в числе этих людей, и в этом посте я хочу рассказать об одной из таких вещей: реализации Тетриса для DCPU-16.
(и сразу дисклеймер: музыка в ролике наложена отдельно для художественной, так сказать, выразительности; DCPU пока выводить звук, увы, не позволяет)