Robot Operating System это фреймворк который позволяет эффективно программировать современных роботов.

Пользователь
Robot Operating System это фреймворк который позволяет эффективно программировать современных роботов.
unlock, потому что им кажется, что это более явное действие.Mutex<()> и разные хитрости, чтобы его имитировать.Mutex неразрывно связаны друг с другом, а также с гарантиями безопасности Rust в целом — изменение одного из них или обоих откроет возможности для возникновения незаметных багов и повреждений из-за гонок данных.lock и unlock было бы опрометчивым в Rust, потому что это позволяет безопасному коду легко вносить ошибки, нарушающие безопасность памяти и вызывающие гонки данных.
Думаю, это очень классная история, когда ты подарил цветы, а они не вянут целый год!
Стабилизированное растение больше напоминает свежесрезанный цветок, чем мумифицированный остов из гербария. Оно остается эластичным — его можно трогать, не боясь, что растение рассыплется от прикосновения.
В основе стабилизации нет никакого чуда: обычные законы физики и биохимии, простые ингредиенты и широкий простор для экспериментов. Хотя у производителей остаются свои секреты.



Для справки: на сайт AUTO.RIA.com, в день добавляется около 100 000 фото.Датасаентисты давно уже знают и умеют решать подобные задачи, поэтому мы с dimabendera написали эту статью именно для программистов. Если вы не боитесь словосочетания «сверточные сети» и умеете писать «Hello World» на питоне — милости просим под кат…
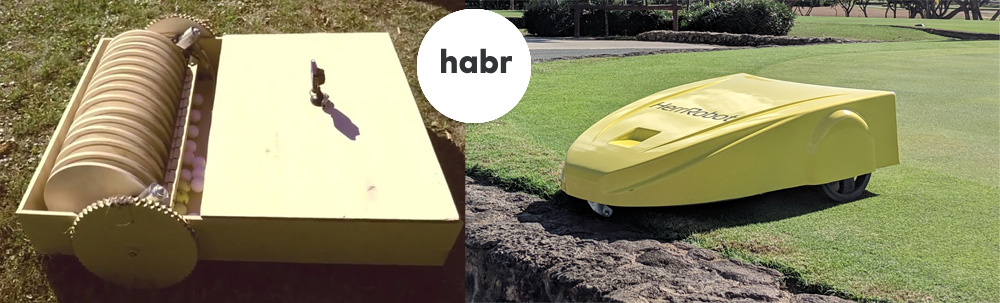
 Все началось с него. Это была первая моя покупка на Алиэкспресс для первой автоматизации на даче — захотелось сделать автополив в теплице. Таймер пришел в помятой коробке, с треснутым защитным колпаком, но рабочий. Он прекрасно отработал весь летний сезон поливая огурцы.На зиму был снят и спрятан в теплое и сухое место. Но на следующий сезон меня ждал неприятный сюрприз — таймер стал зависать, переставал реагировать на кнопки управления и открывать воду. Сначала я грешил на дешевые батарейки и заменил их на фирменные Duraсell. Думал проблема в питании и пусковых токах. Не помогло. Тогда я достал паяльник и пропаял в нем все, что только можно, даже добавил некоторые недостающие конденсаторы. Но он упорно продолжал зависать. К сожалению, изделие не очень ремонтопригодно — в том что было у меня используется бескорпусная микросхема-капля и, видимо, что-то расконтачилось именно под компаундом с микросхемой. Кое-как сезон был закончен с таким барахлящим таймером и я начал думать чем же мне его заменить.
Все началось с него. Это была первая моя покупка на Алиэкспресс для первой автоматизации на даче — захотелось сделать автополив в теплице. Таймер пришел в помятой коробке, с треснутым защитным колпаком, но рабочий. Он прекрасно отработал весь летний сезон поливая огурцы.На зиму был снят и спрятан в теплое и сухое место. Но на следующий сезон меня ждал неприятный сюрприз — таймер стал зависать, переставал реагировать на кнопки управления и открывать воду. Сначала я грешил на дешевые батарейки и заменил их на фирменные Duraсell. Думал проблема в питании и пусковых токах. Не помогло. Тогда я достал паяльник и пропаял в нем все, что только можно, даже добавил некоторые недостающие конденсаторы. Но он упорно продолжал зависать. К сожалению, изделие не очень ремонтопригодно — в том что было у меня используется бескорпусная микросхема-капля и, видимо, что-то расконтачилось именно под компаундом с микросхемой. Кое-как сезон был закончен с таким барахлящим таймером и я начал думать чем же мне его заменить.

Год назад наша CTF-команда на крупном международном соревновании RuCTF в Екатеринбурге в качестве одного из призов получила радиоуправляемый танк.
Зачем команде хакеров игрушечный радиоуправляемый танк? Чтобы его реверсить, конечно.
В статье я расскажу, как при помощи GNU Radio и HackRF One можно c нуля разобраться в беспроводном протоколе управления танком, как декодировать его пакеты и генерировать их программно, чтобы управлять танком с компьютера.


В этой статье я описал создание в AWS состоящего из трех нод кластера Docker Swarm и подключение к нему общего для всех нод реплицируемого тома GlusterFS.



Какое-то время назад я опубликовал статью-презентацию об инструменте под названием QEDA. Если кратко, то это утилита для облегчения процесса создания библиотеки электронных элементов.
Были сделаны полезные выводы, проведена дальнейшая работа, проект развивался. Появился интерфейс коммандной строки (CLI). На сегодняшний день можно говорить о некотором milestone: проект достиг версии 0.1.
В этот статье я рассмотрю типичный рабочий процесс по созданию платы в среде KiCad и использованием утилиты QEDA.
Предупреждение: будут картинки и, как следствие, трафик.

