На написание этой статьи меня сподвигла одноименная статья на хабре: "Беги, муравей. Беги". В ней рассматривается решение задачи коммивояжёра в среде AnyLogic.
О самой задаче можно почитать здесь: Задача коммивояжёра.
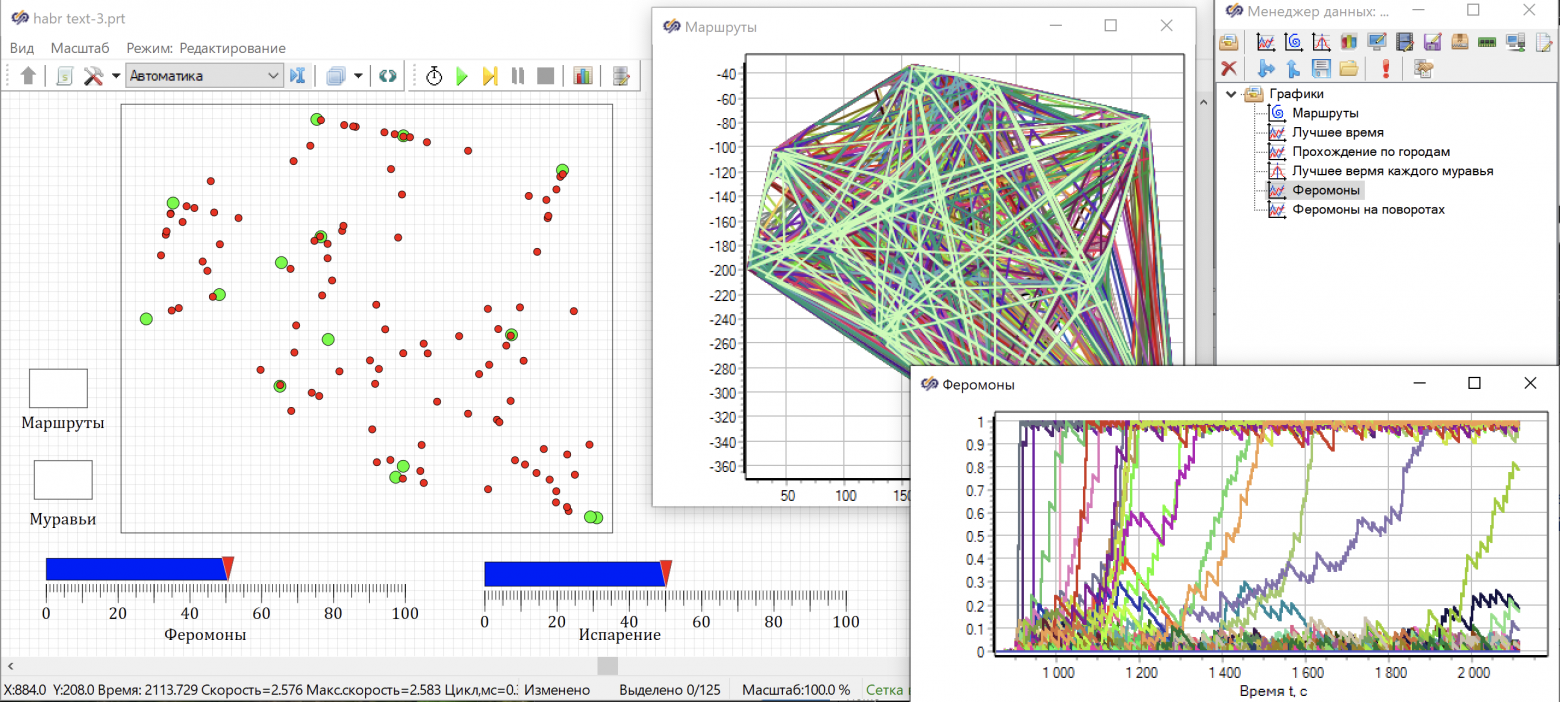
Если кратко, то задача сводится к нахождению самого короткого пути обхода набора точек (городов) на карте. Решение методом перебора не является эффективным, поскольку количество вычислений огромно. Например, для 15 точек существует 43 миллиарда маршрутов, а для 18 точек (городов) уже 117 триллионов!!!
AnyLogic – среда, предназначенная для решения логистических задач с использованием моделей агентов. Мне показалось интересным, что несмотря на «заточенность» среды на агентное моделирование, при создании модели приходится писать достаточно много кода. Поэтому возникла идея: попробовать реализовать подобную модель, используя среду структурного моделирования, в виде графических функционально-блочных диаграмм. Я уже приводил примеры, как можно реализовать принципы объектно-ориентированного программирования (ООП) в графическом языке программирования. См. "Объектное ориентированное программирование в графических языках". Здесь же мы попробуем реализовать агентное моделирование средствами системной динамики.
Дальше будем много хардкороного программежа. Поэтому слабонервным, беременным, девушкам обоего пола, кормящим матерям лучше не читать, во избежание родимчика, свинки и чумки!