Цель работы: Рассмотрение особенностей ввода и отображения широкополосных сигналов.
Задача работы: Построение канала ввода, обработки и отображения сигналов на максимальной частоте преобразования АЦП контроллера Arduino.
Приборы и принадлежности: Контроллер Arduino UNO, пакет Simulink МатЛАБ (R2012).
ВВЕДЕНИЕ
Разработка программных средств для наблюдения, анализа и обработки сигналов на уровне контроллеров требует значительных временных затрат. Подключение контроллера к специализированной среде высокого уровня (Рис. 1) позволяет значительно сократить время проектирования алгоритма для контроллера с учетом ограничений его ресурсов.
Хорошим примером мощной специализированной среды для работы с сигналами является МатЛАБ. Для анализа сигналов зачастую требуется наблюдать его спектр в максимально широкой полосе частот. Для этого контроллер должен принимать сигналы на максимальной частоте преобразования АЦП.
Построение рабочего канала «Arduino UNO – МатЛАБ» для наблюдения и обработки сигналов в реальном времени на предельной частоте преобразования АЦП подробно излагается в этой работе. Особенностью этого канала является то, что такты реального времени задаются не МатЛАБ, а контроллером Arduino. Такое построение не требует компиляции Simulink модели с библиотекой реального времени (rtwin.tlc), что позволяет использовать в модели практически любые блоки библиотеки Simulink.
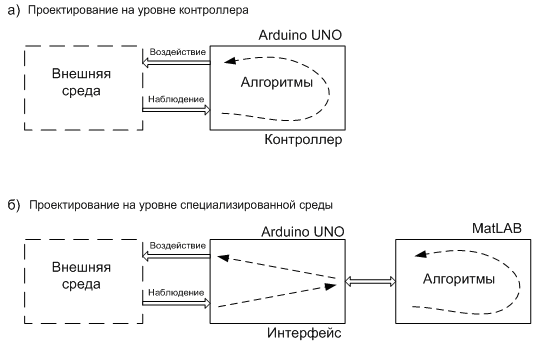
Рис. 1. Сравнение средств разработки алгоритмов. Для проектирование алгоритмов на уровне специализированной среды необходим канал передачи данных между контроллером и средой проектирования.








 я подготовил материал по конфигурации и запуску свежайшего ядра Linux на плате Intel Edison (Arduino Edition).
я подготовил материал по конфигурации и запуску свежайшего ядра Linux на плате Intel Edison (Arduino Edition).



 Когда я участвовал в проведении
Когда я участвовал в проведении