В данной работе представлен процесс дообучения модели генерации текста на основе архитектуры GPT-2. Целью работы является демонстрация возможностей применения дообученной модели для генерации текстов, соответствующих определённым наименованиям заведений, рубрикам и оценкам, выставленных пользователями. Используя предварительно подготовленный датасет, который включал названия заведений, отношение к определённым рубрикам и рейтинг, мы обучили модель на генерацию описательных текстов, которые могли бы отражать характер и уровень заведений в зависимости от их оценочной характеристики.
В данной работе представлен процесс разработки и симуляции мобильного робота с использованием платформы ROS Noetic и среды Gazebo. Описано создание URDF-модели робота, которая включает в себя детальное описание всех его компонентов. Рассмотрена разработка Docker контейнера, что позволяет обеспечить унификацию и воспроизводимость среды разработки. Также описаны файлы конфигурации для управления моделью в Gazebo и настройка PID контроллеров для оптимизации управления движением. Проект включает в себя формирование собственного мира в Gazebo, что позволяет тестировать робота в контролируемой и настраиваемой среде.
В данной работе представлена разработка и тестирование модели машинного обучения, основанной на нейронных сетях, для анализа данных (условно кинематики простого робота). Используя библиотеку PyTorch, была создана и обучена модель, способная обрабатывать численные и булевые параметры, полученные в результате кинематических расчётов. Основная цель исследования заключалась в разработке надёжной и точной модели, которая могла бы способствовать улучшению проектирования и анализа в робототехнике.
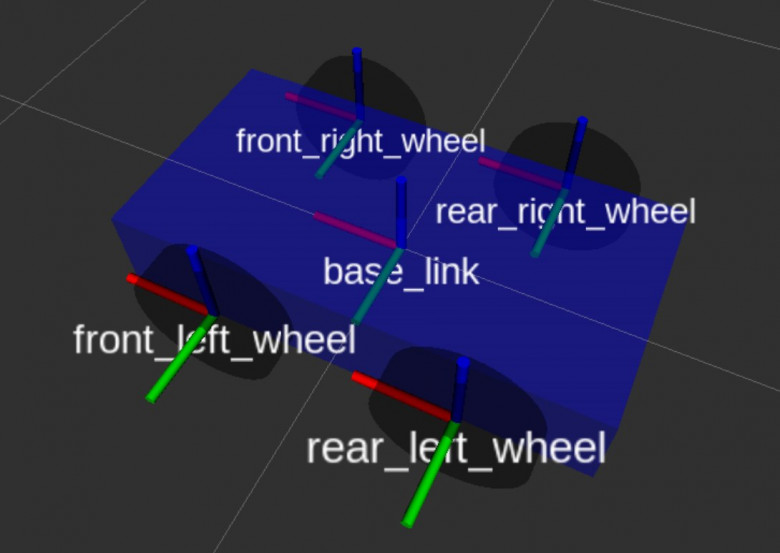
В данной работе рассматривает пример создания симуляционной модели четырёхколёсной мобильной платформы с рулевым управления по типу Аккреманна, с использованием фреймворка ROS, контроллер написан на языке Python. В качестве среды симуляции выбрана Gazebo. Приведены примеры описания архитектуры робота, посредством формата urdf, разработан собственный контроллер для управления колёсами модели, а также показан общий подход к проектированию симуляционных моделей робототехнических систем.
В данной статье даётся общее описание векторного представления вложений слов - модель word2vec. Также рассматривается пример реализации модели word2vec с использованием библиотеки PyTorch. Приведена реализация как архитектуры skip-gram так и CBOW.
В статье описан практический пример настройки проекта на языке C++ с использованием, в качестве примера, библиотеки для многопоточных вычислений OpenMP , а также дальнейшее обёртывание для использования в проектах написанных на Python при помощи библиотеки Pybind11. В качестве системы сборки используется CMake. Основное внимание уделено именно сборке проекта. В качестве инструмента обёртывания используется библиотека pybind11, в качестве системы сборки CMake.
Эта статья посвящена настройке IDE для возможности запуска и отладки Django сервера. Статья нацелена на людей которые столкнулись с подобной проблемой и хотелось бы поделиться опытом, так как сам прошёл эти этапы.