Планировщик движения беспилотного автомобиля — это алгоритм-помощник, который общается с другими участниками движения посредством манёвров. То есть он действует так, чтобы другим было понятно, куда поедет беспилотник, и сам по действиям других пытается определить, кто куда будет двигаться и почему.
В диалоговых системах совсем недавно произошла революция из-за появления ChatGPT. В беспилотных автомобилях революции, к сожалению, пока не произошло, но если это случится, то как раз в той области, про которую будет мой рассказ.
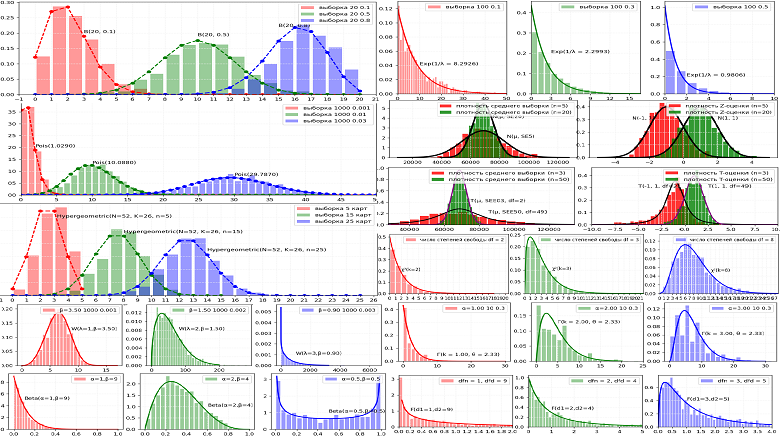
Под катом — детальный разбор логики движения беспилотника, примеры свёрточных и трансформерных архитектур моделей для предсказания движения и много формул для расчёта вероятных траекторий других машин и пешеходов. А ещё я расскажу, в чём преимущества машинного обучения перед эвристиками и чем может помочь Reinforcement Learning.