Программируем квадрокоптер на Arduino (часть 1)
18 мин

Здравствуйте, хаброжители!
В этой серии статей мы с вами приоткроем крышку квадрокоптера чуть больше, чем этого требует хобби, а также напишем, настроим и запустим в воздух собственную программу для полетного контроллера, которым будет являться обычная плата Arduino Mega 2560.
У нас впереди:
- Базовые понятия (для начинающих коптероводов).
- PID-регуляторы с интерактивной web-демонстрацией работы на виртуальном квадрокоптере.
- Собственно программа для Arduino и настроечная программа на Qt.
- Опасные тесты квадрокоптера на веревке. Первые полёты.
- Крушение и потеря в поле. Автоматический поиск с воздуха средствами Qt и OpenCV.
- Окончательные успешные тесты. Подведение итогов. Куда дальше?
Материал объемный, но постараюсь уложиться в 2-3 статьи.
Сегодня нас ожидает: спойлер с видео, как наш квадрокоптер полетел; базовые понятия; PID-регуляторы и практика подбора их коэффициентов.
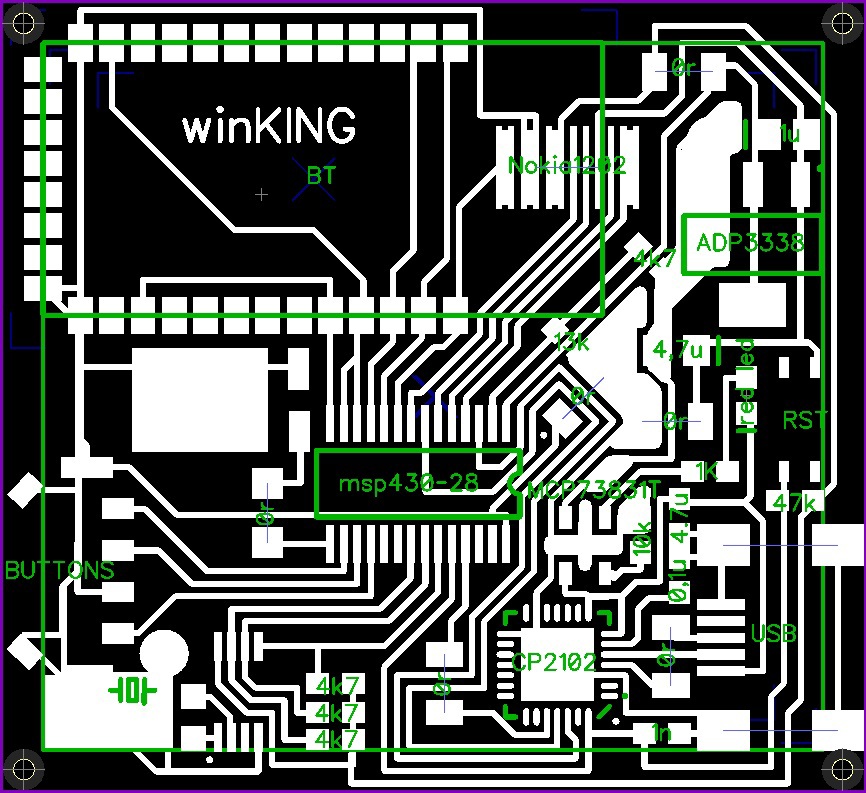
 Началась эта история с того, что начитавшись постов с тегом DIY я решил обзавестись набором МК + отладочная плата. Погуглив, узнал что самая дешевая в городе плата это LaunchPad от TI. Не долго думая, отправился за ней в магазин, и понеслась… как и у всех сначала были мигания светодиодами, потом подключение дисплея от Siemens CX75, и т.д.
Началась эта история с того, что начитавшись постов с тегом DIY я решил обзавестись набором МК + отладочная плата. Погуглив, узнал что самая дешевая в городе плата это LaunchPad от TI. Не долго думая, отправился за ней в магазин, и понеслась… как и у всех сначала были мигания светодиодами, потом подключение дисплея от Siemens CX75, и т.д.  Большинство проектов, использующих коптеры, опираются на ручное дистанционное управление, полностью автономных систем пока нет. Но для индустриального использования это необходимо; человеческий фактор — причина большинства аварий. Ниже рассказ пойдёт про то, как мы делали свою систему стабилизации с помощью ПИД, позволяющую свести к минимуму участие человека в процессе работы дрона.
Большинство проектов, использующих коптеры, опираются на ручное дистанционное управление, полностью автономных систем пока нет. Но для индустриального использования это необходимо; человеческий фактор — причина большинства аварий. Ниже рассказ пойдёт про то, как мы делали свою систему стабилизации с помощью ПИД, позволяющую свести к минимуму участие человека в процессе работы дрона.