Comments 94
Честно говоря, я думал так и делается: нейросетями распознают изображения, а потом математически рассчитывают траектории...
ИМХО к этому нас и приведёт развитие.
Я полагаю что если автопилоты покажут ожидаемую надёжность, то году к 2030 в некоторых странах будет уже невозможно получить водительское удостоверение. То есть условно люди до 2012 года рождения всё ещё будут допущены на дороги в качестве водителей. Те что после 2012 года — будут допущено только как пассажиры автопилота.
В связи с этим человеческий фактор будет меньше влиять на аварии. Старики сами захотят избавиться от лишних действий, богачи избавятся от водителей, молодёжь наконец то сможет бухать всю ночь не боясь сесть в машину.
что за "вместо обучения"? опять кто-то что-то с журналистами делает ....
В принципе — идея действительно здравая, чтобы автопилот во время работы придерживался и записывал в память все критические параметры окружения (и, НЯП, мат.модель об этом — что считать таковыми), и при разборе ДТП это учитывалось.
Я бы еще предложил, раз такое дело, то машины с автопилотами оборудовать дополнительными ходовыми огнями — например оранжевой полосой сзади (ниже или на уровне стопов-поворотов). Чтобы при включении автопилота — она автоматически зажигалась тоже, и сигнализировала: "да, это транспортное средство не так быстро разгоняется, перестраивается и поворачивает. Зато оно не делает резких движений, держит дистанцию и у него на борту пять видеокамер, три радара и т.д., и в случае ДТП — будет свидетелем".
Это всё замечательно, и к этому нужно стремиться.
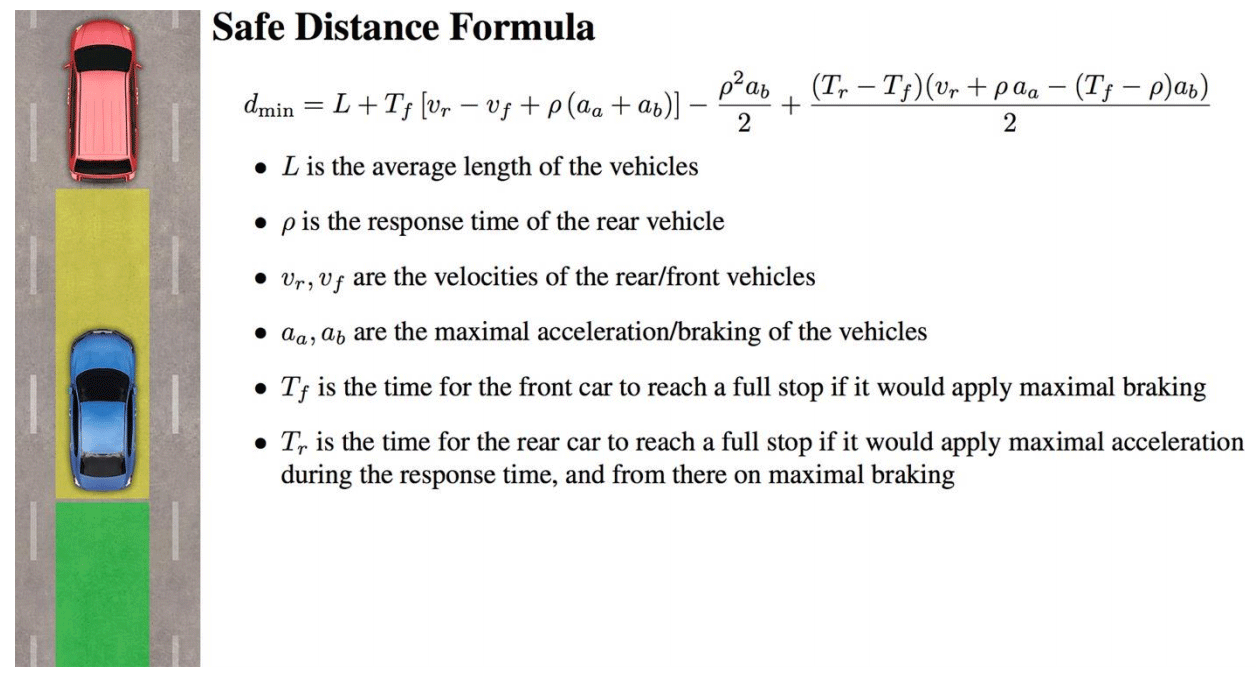
Но например данная формула не учитывает, что в случае непредвиденных ситуаций скорость торможения может уменьшаться (неисправность тормозов или потеря сцепления с дорогой) или увеличиваться (наезд на стену или в камаз с мгновенной остановкой). Интересно, как соотносится вероятность таких событий с заявленной цифрой 10^-9 ?
может, это для расчёта интервала величин? Т.е. "если передняя машина будет останавливаться со скоростью х1 — то значит дистанция — у1, а если х2 — то у2, и т.д."
Или, возможно — по поведению самого водителя. Есть такие, которые то резко тормозят, то резко ускоряются, а есть — которые медленно, можно это отслеживать в процессе.
Во-вторых — это еще можеть быть формула для предсказания аварии, т.е. "так, я сейчас торможу на светофоре, чтобы задняя машина затормозила ДО меня, то ей сейчас нужно сбрасывать скорость 1 км/ч за время т1 мс. Прошло уже 500мс, а она не тормозит — значит приедет в меня".
Ну да. Так и вижу ситуацию:
Сзади едет рейсер К0Т, на своей Мазде, которая еще видела Джорджа Буша Старшего.
К0Т всегда тормозит в пол и останавливается в 5см от бампера впередистоящей машины. Потому что время не щадит никого, потому что Дж.Буш Старший и вообще потому что может.
И вот, этот наш ИИ пытаясь избежать столкновения резко дает газ, выезжая на перекресток на темно розовый.
К0Т, резко затормозил перед стоп линией, как он обычно делает.
К0Т очень удивился с машины спереди — «Чё творит, [нрзбрч]?»
Ни с того ни с сего, серебристая Харизма, с визгом резины попыталась умчаться в закат, но была вовремя наказана низко летящим поперечным камазом
{{ тут слоумо удара, сминаемой машины, бородатого хипстера, дисплей на панели харизмы с текстом (взять крупным планом) «ИИ прощается с вами. Хорошего вам настроения, счастья, здоровья и держитесь тут. Как следует держитесь :)» }}
В салоне Кота, сквозь умц-умц-умц, слышно как тот говорит "[нрзбрч] [нрзбрч]! Понакупают прав, [нрзбрч]. Ездить не умеют, [нрзбрч]. Надо видос будет с регика в Одноклеточники слить [нрзбрч] [нрзбрч]".
В итоге имеем 1 труп, 2-3 искореженных машины, но зато клёвый видосик в ru_chp с метками #на_все_деньги, #любимые_мелодии, #большой_грузовик_наказания, #синька_и_норкоманы, #последние_секунды_жизни
{{ затемнение экрана }}
{{ текст по центру «ВЫ ХОТИТЕ ЧТОБЫ ЗАМОРСКИЙ ИИ НАЖАЛ КНОПКУ DELETE НА ВАШЕЙ ЖИЗНИ?» }}
Про летящий камаз система тоже может знать и выбрать между помятым багажником и тотальным демонтажом половины авто.
Стёкла перед столкновением, наоборот, экстренно опускаются, если я не ошибаюсь.
Проблема в обсуждении ИИ в другом — почти любой водитель хоть раз в жизни грубо нарушал ПДД, чтобы избежать аварии. Некоторое кол-во из таких в итоге в аварию попали или даже усугубили ситуацию. Могу надеяться, что общая статистика по авариям говорит, что нарушение ПДД при уходе от аварии — благо и уменьшает аварийность.
Но от ИИ-то ожидают 100% (или 99%) «верного» (с точки зрения выживаемости/уменьшения нанесённого вреда) решения.
К примеру, выезд на обочину нередко может оказаться предпочтительней, нежели «оттормаживаться в пол до столкновения» (предпочтительней, но с массой «если»: обочина широкая, на ней никого нет, нет риска убиться в кювете и т.д.).
Или ещё один классический случай — водитель начинает пропускать пешехода, а едущий сзади явно не успевает оттормозиться.
Варианта два — начинаем пропускать перехода, получаем сильнейший удар сзади, давим пешехода, но виноват тот, кто оказался сзади.
Либо — сигналим, всем видом показываем, что пропускать человека не собираемся и проезжаем дальше. Нарушили? Нарушили и получили массу минусов в карму от обиженного пешехода. Избежали ДТП? Да, причём одному, возможно, жизнь спасли, а второго от тюрьмы уберегли.
Сигналить и всем видом показывать, что пропускать не собираемся — не вариант. Предсказать реакцию пешехода в таком сценарии невозможно, и единственное правильное решение — тормозить. По возможности — маневрировать, если это не создаст помех другим участникам движения.
Я вижу только один выход в этом сценарии — тормозить И сигналить пешеходу.
Могу надеяться, что общая статистика по авариям говорит, что нарушение ПДД при уходе от аварии — благо и уменьшает аварийность.
Сомневаюсь, потому что большая часть случаев, когда аварии удалось избежать, не попадёт в статистику — об этом просто никто не узнает.
Безумное кол-во аварий избегается по методу «ДДД». И если роботы не научатся пользоваться этим неписанным принципом, то аварийность с их появлением увеличится многократно.
Как пример — перестроение с неосознанным подрезанием.
Избежать ДТП легко — просто притормозить, когда видишь подозрительный манёвр едущей чуть впереди машины. Особенно, если ты в её мёртвой зоне.
В случае ДТП однозначно прав ты, но если чуть притормозить, то ДТП не произойдёт (и не попадёт в статистику).
А уж про обгоняющих по встречке по принципу «да успею я, точно успею вон перед той машинкой проскочить» вообще молчу. На одной чаше весов — потеря 10 секунд времени (максимально прижаться к обочине, даже пересекая сплошную линию), на другой (если действовать строго по ПДД и просто тормозить в пол) — минимум две машины на серьёзный ремонт, максимум — два и более трупов.
Что значит единственным? Насколько я понимаю логика запрета такого поведения основывается на невовлечение в ДТП тех кто к нему не причастен. Всегда есть риск не заметить машину на встречной полосе и тем более на перекрестке.
Причастность к ДТП определяется только с момента его (ДТП) возникновения, а до этого есть участники ДД, часть из которых, возможно, уже нарушает ПДД, хотя и это не факт.
Если на вас сзади летит Камаз без тормозов, а вы притормаживаете на перекрёстке, у вас, к примеру, выбор:
1. Остановиться и получить удар сзади. Сильный. Скорее всего — вылететь на тот самый перекрёсток под колёса других машин.
2. Осмотреться на перекрёстке и проскочить его в любом направлении (самое безопасное — уйти в правый поворот, либо на обочину, но уже проехав стоп-линию). В кого там влетит Камаз вас уже не волнует, вы не стали участником ДТП и не являлись его причиной.
Ваш выбор? По ПДД должны тормозить перед светофором и ждать удара.
По жизни — лучше проехать на красный свет, пусть даже допустить боковой удар в непричастный а/м (а через секунду после вас на перекрёсток вылетит тот самый Камаз).
Понятно, что это всё частности и вероятность их возникновения у конкретного водителя невысокая, а вот у массовых беспилотников такое будет происходить уже раз в неделю-день-каждый час (если взять десятки миллионов машин) и станет очень заметно.
Возьмём вашу ситуацию — если грубое нарушение ПДД с вероятностью 70% спасёт жизнь водителю, но при этом с вероятностью 5% убьёт пешехода (которого водитель не видит), то:
— живой водитель скорее будет действовать по принципу, что в худшем случае — «лучше плохо сидеть (в тюрьме), чем хорошо лежать (в гробу)»
— автопилот будет следовать правилам, т.к. в случае ошибки (те самые 5%) у компании-разработчика будет масса проблем
И… как пассажир при прочих равных я выберу такого водителя, который будет защищать собственную (а заодно и мою) жизнь.
Отсюда же следует вывод, что беспилотники получат признание, когда степень их аварийности действительно станет существенно ниже, чем у живых водителей. Тогда им будет простительна беспощадность в таких вот случаях.
Описанная вами ситуация самый лучший пример почему будет сопротивление внедрению автопилотов, т.к. находясь за рулём авто водитель примет решение (если успеет)уходить на тротуар даже если там будет толпа, т.к. он спасает свою жизнь и жизнь близких, а га остальных в данной ситуации грубо говоря "они оказались не в то время не в том месте", при этом с точки зрения условного "глобального ИИ" нужно выйти из ситуации наименьшими потенциальными жертвами, что вполне может быть достигнуто включением задней передачи и газом в пол с целью снизить скорость КАМАЗа до минимума.
Я думаю, в своей работе Mobileye предусмотрели больше чем одну формулу. И/или ускорение и замедление в формуле не зашиты жёстко для автомобиля, а, например, корректируются с учётом окружающих условий.
А здесь в статье неполный пересказ.
Тут все намного проще — использовать подходы классической теории управления. Важно понимать два нюанса — важен правильный выбор регулируемых величин и даже при таковом не всегда получится оптимально управлять объектом, если утрировать, то не всегда получится и сбросить скорость и избежать аварии. Статистика и нейросети нужны как минимум для понимания, как надо управлять. Например, если сзади фура, тормозить надо сильно заранее и с меньшей энергичностью. А как максимум для умного эвристического управления, когда выбираются не только параметры действий, а и стратегии управления (свернуть влево вместо торможения, когда это поможет избежать аварии и тп).
где взять те самые «время до полной остановки транспортного средства при максимальном торможении»
Эта величина ограничена ГОСТами в общем-то, а так считается для легкового автомобиля по формуле скорость²/200.
Можно еще добавить скорость реакции, 3*скорость/10.
Данные формулы из автошколы Германии, скорости в км/час.
Из таких формул можно вывести безопасное расстояние можно определить по формуле
скорость*время*коэффициент/4
время в городе 1 секунда, за городом — 2 секунды
коэффициент — 1 на сухой дороге, 2 на мокрой, снег или грунтовка — 4
Думаю у компьютера проблем не будет с такой задачей с гораздо более точными данными.
А вот как в чётких формулах учесть состояние покрышек другого ТС, тормозной системы, состояние водителя я даже не представляю.
На неисправном ТС выезжать нельзя на дорогу (такое никакие правила не предусматривают ни в одной отрасли). С состоянием водителя сложнее, выезжать нельзя, но может и в дороге поплохеть. Это уже исключительная ситуация и наличие нормальной системы контроля транспорта.
Слепой алкоголик — это и есть те самые 10^-9. В большинстве случаев даже его можно объехать, но если нет — репутационных потерь для робомобиля никаких.
слепой, упоротый алкоголик, на лысых покрышках, в гололёд, едущий с превышением лимита раза в 2
Ну это или редкость (такое в Германии предмет новостей общенемецких) или страна третьего мира. В последнем случае внедрение робомобилей явно не на повестке дня.
Кстати, именно «безопасный» с точки зрения нарушения ПДД и перекладывания ответственности на водителя-человека описан сценарий с выездом с парковки. Формула не учитывает участников движения двигающихся с превышением ограничения скорости.
А зачем уменьшать вероятность ДТП на три порядка по сравнению с белковым водителем? Мне почему-то казалось, что для допуска на ДОП достаточно уменьшить её на 0 порядков.
А в реальности если пьяный водитель кого-то убьёт — это понятно и привычно, здесь нет никакого информационного повода. Но если в аварию попадёт автомобиль с автопилотом — сразу во всех новостях появятся сообщения «ИСКУССТВЕННЫЙ ИНТЕЛЛЕКТ УБИВАЕТ!!!111».
И даже если автопилоты будут в 10 раз реже попадать в аварию, каждый такой случай будет привлекать внимание.
Да и при 10^-9 в час первые ДТП произойдут практически мгновенно. И в новостях такие сообщения всё равно появятся. Но, думаю, через годик всё устаканится и всем надоест паниковать на эту тему. Не думаю, что с уменьшением вероятности что-то изменится.
Если можно сделать лучше, то почему нет?
Лучше, конечно, больше. Но достаточно и текущего уровня безопасности.
Если он будет хоть на йоту безопасней водить и парковаться, это снизит стоимость владения, а может и страхования. Не малая часть ДТП связана с таким, как может показаться на первый взгляд, простым действием как парковка!!!
В итоге получим, автомобилем, условно более дорогим, дешевле владеть.
Вот зачем менять.
Если он будет хоть на йоту безопасней водить и парковаться, это снизит стоимость владения, а может и страхования.
В качестве исходных данных выше сказано было, что он не будет безопаснее.
Остальное вполне может современный автомобиль с автоматической коробкой (тот же Пассат отлично подбирает передачи под горку так, что независимо от скорости двигатель идет в оптимальном режиме).
А Я говорю про манеру вождения. Робот не будет «давить в пол» на мигающий зелёный или желтый, он скорее оттормозится и постоит на светофоре (а это плюс к безопасности). Робот не будет «играть в шашки» в городе или ехать больше 40 — 60 км/ч. Робот не будет делать массу того, что делают люди, даже не задумываясь о том, что это ведёт к увеличению расхода топлива, масла, ресурса агрегатов. Про безопасность молчу.
К тому же, логично предположить, что робомобили будут ездить с максимально доступной скоростью без излишнего перерасхода топлива на резкие старты.
Будут держаться правой полосы, оставляя левую свободной, для торопящихся… Но это утопия…
Да, но наличие коробки автомата не уберегает от излишних расходов топлива!
Да ладно. Коробка настроена на минимальное потребление топлива. Почти всегда на бензиновой малые обороты, в дорогих вариантах еще и есть какой-нибудь гироскоп, чтобы переключать на оптимальный режим.
Я говорю про манеру вождения. Робот не будет «давить в пол» на мигающий зелёный или желтый, он скорее оттормозится и постоит на светофоре (а это плюс к безопасности). Робот не будет «играть в шашки» в городе или ехать больше 40 — 60 км/ч.
В Германии описанные вами стили вождения — скорее исключение. Как и езда с превышением.
Робот не будет делать массу того, что делают люди, даже не задумываясь о том, что это ведёт к увеличению расхода топлива, масла, ресурса агрегатов.
Если вы, например, о вышеприведенной информации, то это просто решается нормальной автошколой.
Про безопасность молчу.
Еще раз — выше исключили этот параметр в данной ветке.
А если не заморачиваться на состояние бамперов и ЛКП, законодательно ограничить возмещение в таких случаях можно капитально снизить издержки на владение авто. Можно ещё запретить бампера в цвет кузова )
По-моему со статистикой это умозаключение имеет мало общего. Нужно будет собрать намного больше экспериментальных данных. Впрочем, это только подтверждает выводы статьи.
Беспилотный автомобиль (синяя машина на рис. 3) чётко знает, какие коридоры должны соблюдаться до впереди идущего автомобиля и перед автомобилем позади. Если водитель-человек вторгнется в этот коридор, например, спереди (то есть подрежет беспилотник), а из-за резкого оттормаживания беспилотник столкнётся с автомобилем сзади, то виновником такого ДТП в случае разбирательства будет признан красный автомобиль с человеком-водителем за рулём.
ну и… эти коридоры такие и есть в обычных нынешних человеческих ПДД. перестроился слишком близко спереди, значит вынудил водителя тормозить (а он должен тормозить чтобы соблюдать дистанцию), а значит не «уступил дорогу». вопрос только в доказательстве этого, в измерении дистанции, в том на сколько сильно подрезанный должен тормозить и когда он из «подрезанного» станет тем, кого подрезали а он просто продолжил ехать без дистанции не предпринимая мер к её увеличению.
Рис. 1. Беспилотный автомобиль в центре ничего не способен предпринять для обеспечения гарантированной безопасности.
что имеется ввиду? он может снизить скорость и уйти из этой ловушки, если его, конечно, не преследуют специально.
При расчёте безопасного состояния и соответствующих осторожных действий математическая модель RSS учитывает в том числе ситуации, где объекты (автомобили, пешеходы и проч.) закрыты другими объектами. Например, на рис. 4 автомобиль осторожно выезжает с парковки с учётом максимально возможной скорости () автомобиля на дороге.
так и делают счас водители. что тут нового?
Как три закона робототехники Айзека Азимова, только для ПДД.
В российских ПДД уже есть один такой закон:
При возникновении опасности для движения, которую водитель в состоянии обнаружить, он должен принять возможные меры к снижению скорости вплоть до остановки транспортного средства.
Будет ли автопилот внезапно на порядок-другой надежнее того что используется ныне?
Оффтоп. У xkcd есть решение.
Это первое что пришло мне в голову, как только стали писать об автопилотах построенных не нейросетях.
Конечно стоит, но не в качестве первостепенного фактора. Первостепенной является дистанция до чёрного. Если чёрный, по любой причине, нажмёт на тормоз «в кол» и произойдёт ДТП, виноваты будете вы. Если вам в зад въедет зелёный (не обязательно из-за массового торможения, может, у зелёного в принципе тормоза отказали или он сознание потерял), это будет на его совести и ответственности. Именно так собираются «паравозики»… Стоит одному держать безопасную дистанцию, «паравозик» разорвётся и предотвратит массовое ДТП.
Избавляться от нейронных сетей нужно, но в данном случае это возможно только созданием сети дорожных знаков который понятны машинам без нейронных сетей — типа rfid метод на знаках.
А ещё сети автомобилей с rfid метками, сети пешеходов с rfid метками и сети препятствий с rfid метками. Все ямы тоже быстренько rfid метками помечать.
Машины точно надо снабжать метками — они должны обмениваться между собой дорожной информацией.
Может в распознавании ям и упавших деревьев нейросети останутся, но сферу их применения нужно минимизировать.
Разработки вышеописанных стандартов — это очень хорошо. Но их принятие должно сопровождаться усилением контроля соблюдения ПДД. Сейчас же — полная анархия! (говорю за свой ареал, может где-то там ха океаном люди умеют хорошо ездить).
Причем сцепление может меняться неожиданно.
В качестве примера, в солнечный летний день стартуя со светофора не мог понять почему машина не едет и противобуксовкой моргает, нажал на тормоз и переосмыслил свое поведение после мгновенного отклика АБС. А всего лишь на асфальте какую-то дрянь разлили на не очень большом участке.
А что делать, если ПДД разные в разных странах?
провал был неизбежен, потому что исследователи изначально поставили недостижимые цели и раздули хайп.Ага. Теперь стали типа умней. Просто теперь сначала раздули хайп, а потом поставили недостижимые цели. У самых умных была самая достигаемая цель — сам хайп.
Intel предложила математические правила безопасности для беспилотных автомобилей вместо обучения нейросети