Comments 153
В общем, пара абзацев все равно бы не помешала.
Почему не ответить на вопрос сразу?
По схеме планер с высоким качеством + медленно машущее крыло.
Проблема в том, что проще и надежнее винт.
«Аппарат тяжелее воздуха летать не может» ;)
Попробуйте найти ссылку на первоисточник этой фразы.
Вас ждёт сюрприз :)
Ссылка: zapatopi.net/kelvin/papers/letters.html#baden-powell
А какой сюрприз?
Первым сюрпризом является то, что это не та цитата — в ней нет слов "аппараты тяжелее воздуха".
Вторым сюрпризом является суть того что расположено по приведённой Вами ссылке — это ответ известной персоны на предложение вступить в очередное общество.
В данном случае это общество по летанию на воздушных змеях.
При этом, предложение исходит не от человека занимающегося авиацией, а от шибко инициативного деятеля которому вот сейчас захотелось полётами заняться. Впоследствии этот же деятель организует скаутское движение.
То есть, то на что Вы ссылаетесь, это вежливый отказ очередному просителю.
Первым сюрпризом является то, что это не та цитата — в ней нет слов «аппараты тяжелее воздуха».
Вы серьезно? Действительно, я вообще не уверен, что лорд Кельвин знал эти русские слова.
Вторым сюрпризом является суть того что расположено по приведённой Вами ссылке — это ответ известной персоны на предложение вступить в очередное общество.
…
То есть, то на что Вы ссылаетесь, это вежливый отказ очередному просителю.
И как это влияет на суть ответа? А, точно, известные персоны ведь имеют обыкновение рассказывать всякую чушь ничтожным просителям)
Вы серьезно? Действительно, я вообще не уверен, что лорд Кельвин знал эти русские слова.
Тут есть два момента.
1) Знал он такие слова или нет, но факт остаётся фактом — англоязычная цитата не является первоисточником русскоязычной.
2) Он знал эти слова как "heavier than air"
И как это влияет на суть ответа?
Вот именно на суть это и влияет.
Это не доклад на конференции по аэронавтике или тематическая статья, это ответ на зазывание в какое-то там общество.
Знаете такой жанр как "вежливый отказ"?
Вот эта цитата вполне может оказаться всего лишь вежливым отказом.
- я сегодня уже ел, поэтому не буду у вас есть
- я сегодня занят, поэтому не приду к вам на мероприятие
- у меня нет ни малейшей молекулы веры, поэтому я в ваше общество вступать не буду
Спасибо.
Более того, прежде чем писать это всеръёз, я ещё и пробежался по источникам.
Не глубоко, впрочем.
Глубоко я эту тему смотрел некоторое время назад.
Там очень интересно и сильно не так как это принято писать в развлекательных текстиках "вообще никто не верил, но 17 декабря 1903 года они перевернули мир".
Там с 1890-х в эту тему ломились все кому не лень, и проблема была всем понятна — энерговооружённость.
И если смотреть рассуждения о невозможности полётов аппаратов тяжелее воздуха, то там оказываются (1) не настолько категоричные утверждения (2) рассуждения о конкретных реализациях или типах двигателей.
Нет, это был астроном и математик Саймон Ньюком (Simon Newcomb), и фраза была:
Flight by machines heavier than air is unpractical and insignificant, if not utterly impossible.
(Полёты на машинах тяжелее воздуха непрактичны и малозначительны, если вообще возможны.)
Он говорил это за год-другой до полёта братьев Райт, и обосновывал свой скептицизм отсутствием нужных материалов и достаточно мощных двигателей, чтобы преодолеть проблему "квадрат-куб" при увеличении размеров аппаратов:
It is then a problem of strength of materials to form a combination in which the ratio of efficiency to weight will be enough to make the machine fly.… If we had a metal so rigid, and at the same time so light, that a sheet of it twenty meters square and a millimeter thick would be as stiff as a board and would not weigh more than a ton, and, at the same time, so strong that a powerful engine could be built of it with little weight, we might hope for a flying machine that would carry a man.
Я не вижу в моих ссылках упоминаний о лорде Кельвине и его высказываниях.
А zapatopi.net, на который ссылались вы (и, который, похоже, упал под хаброэффектом), есть такое:
"I can state flatly that heavier than air flying machines are impossible."
[Note: this quote is widely circulated, especially among self-help gurus, motivational speakers, and the like, but a newspaper archive search and Google book search shows no hits published during Kelvin's lifetime.]
К тому же это противоречит словам того же Кельвина:
Some day, no doubt, some one will invent a flying machine that one will be able to navigate without having to have a balloon attachment. But the day is a long way off when we shall see human beings soaring around like birds.
Можете привести точную библиографическую ссылку на конкретную статью лорда Кельвина, где он это писал?
2 Преимущества перед самолетом.
Главное это возможность короткого или практически вертикального (при продвинутой механике крыла) взлета и посадки, но при этом горизонтальный полет на качестве близком к самолетному (10-12)
3 Преимущество перед вертолетом — высокое качество горизонтального полета.
Т.е. нужно понимать, что самолет очень эффективен в горизонтальном полете, вертолет абсолютно эффективен на режиме висения и вертикального набора/спуска. Махолет способен сочетать в себе эти преимущества. При должном развитии привода возможно добиться надежности и стоимости на уровне вертолета тем самым получив универсальный летательный аппарат.
И да махолет можно создать со значимой грузоподъемностью, физика ничего против этого не имеет, все дело в верном конструкторском подходе при создании необходимой для полета частоте маха. По нашим оценкам, при должном конструкторском совершенстве, махолет вполне способен выйти на 25-30% полезной нагрузки от взлетной массы (показатель самолета) при достаточной дальности полета.
Потому, что при данном размере(ограниченном) эффективность зависит от скорости.
И у крыла — также.
Тоесть сравнивать надо со сверх-тихоходными винтами тогда.
Вертикальный взлет на обозримо-доступных материалах — невозможен по прочности.
А вы знаете, ПОЧЕМУ скорость кончика пропелера большая?
Все верно, но только чтобы совершать горизонтальный полет, при достаточном размахе крыла, вам не нужно его так разгонять, как самолетный винт (не говоря уже о вертолете). Если проще, чтобы добиться некой скорости вы должны (условно) сообщить воздушной массе некий импульс, благодаря чему сами продвинетесь вперед. Винт это делает в диаметрах 2-3 метра (для небольших самолетов), для тех же самолетов размах крыла равен 10-12 м. Ометаемая площадь (pi*d^2)/4 для винта (d-диаметр винта) и (fi*L^2)/4 (fi — амплитуда маха, примерно 1-1,5 радиана). Посчитаем Svint = 7м.кв. Skryl=36м.кв. Следовательно, скорость движения крыла может быть в 5 раз меньше, конечно если оно такое же эффективное, как винт.
Вертикальный взлет доступен вполне, ничего в этом сложного нет. Кстати В. А. Киселев это теоретически обосновал и доказал. Да есть проблемы, но дело вовсе не в материалах, а скорее с специфике привода.
Если вы возьмете винт того же диаметра — вам тоже не прийдется его разгонять, да.
Не сравнивайте махолет с крылом. У вас тут движитель, это аналог вертолета с таким же размером винта. Причем надежность даже меньше винта, ибо винт держится за счет цетробежного ускорения частично.
Пробовали схему с параллельным взмахом крыла? Если да, то почему не зашла?
схему с параллельным взмахом крыла
Схематичная моделька:
fly-history.ru/books/item/f00/s00/z0000015/pic/000035.jpg
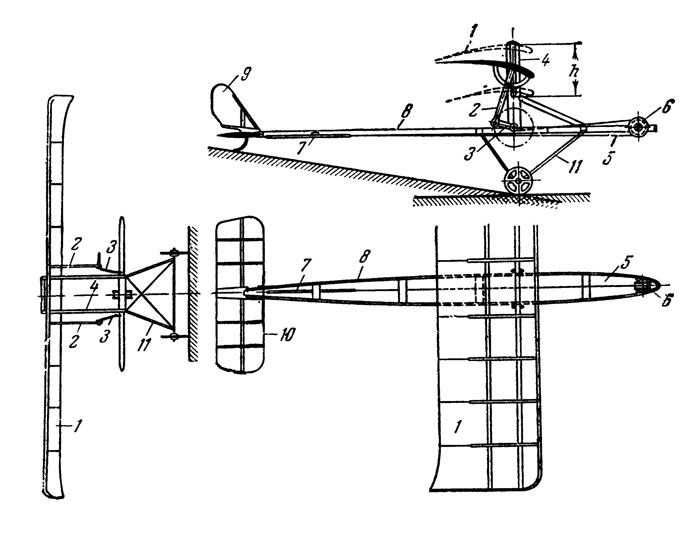{kind=link}
вертолет абсолютно эффективен на режиме висения и вертикального набора/спуска.
А не на режиме косой обдувки? Там же есть какое то состояние наивыгоднейшей скороподъемности
самолет очень эффективен в горизонтальном полете, вертолет абсолютно эффективен на режиме висения и вертикального набора/спуска. Махолет способен сочетать в себе эти преимущества.
А конвертоплан уже не сочетает в себе эти преимущества?
Видимая со стороны проблема махолётов — в отличие от птиц, они не гасят колебания конструкции за счёт множества мышц. Конструкция жёсткая — не реагирует на возникающие моменты и не может их использовать с пользой.
p.s. вспомнил одну книжку из детства, там была статья про модель махолёта:
pedagogic.ru/books/item/f00/s00/z0000074/st040.shtml
Ну да. Но есть вариант, что материал, который поглощает и гасит удары, будет хоть что-то при этом накапливать. А не просто рассеивать в виде тепла.
Потому что иначе в тех самых нежёстких передачах энергия будет теряться.
Гм… А куда она в полете может деться? Это же изолированная система. Там из "потерь" только нагрев в деталях (потому что кпд той же резины не 100%), вот и все. Любые остальные потери будут приводить либо к смещению центра тяжести по высоте, либо колебаниям вперед-назад.
В обоих случаях это можно дальше использовать для полезной работы: с высоты можно планировать с неподвижными крыльями, а вперед-назад — это тяга. Можно конечно бессмысленно тратить эту энергию, просто перемешивая воздух и тратя энергию на придание ему турбулентности. Тогда эта энергия будет тратиться на перемещение массы воздуха и закручивание вихрей. Но это просто неэффективное использование привода/аэродинамики, а не потери в обычном смысле.
Весьма впечатляющая демонстрация, и просто красивые птички. От птиц, кстати, отличаются значительно меньшим количеством маховых перьев — скорее стрекозы, а ведь у них кинематика значительно сложнее. Всё смотрится обманчиво просто, но понятно, что этой простоте предшествовало много конструкторской работы.
Какова, если не секрет, мощность электродвигателя?
Что если для мускулолёта подобная упрощённая схема будет оптималнее орнитоптера?
Спасибо пионерам-махолётчикам.
— У птиц крыло не прямое, при махе оно изогнуто вниз (по тому же принципу делают управляемые парашюты и кайты). Не рассматривалась ли такая возможность повышения подьемной силы (хотя бы в виде обратного V как у экранопланов)?
— Отдельные моторы на каждую пару или даже каждое крыло? Есть тихоходные асинхронники с датчиком положения вала — он бы помог и в планирующем полете.
У птиц крыло не прямое, при махе оно изогнуто вниз ...— у махолета (конкретно у наших) аэродинамика очень неоднозначная. Т.е. классический подход по стационарной аэродинамике не работает (это мы проверили на опыте). Вокруг крыла формируется сложная нестационарная картина, и подъемная сила формируется во многом «энергетически» за счет энергии движения крыла.
Отдельные моторы на каждую пару или даже каждое крыло...— да, это решение вполне возможно при правильном проектировании актуаторов на базе безколлекторников и грамотной автоматике с датчиками холла и прочим. На базе СТМ вполне можно попробовать замутить, но опять же вопрос финансирования.
Ваши крылья имеют профиль, рассчитанный на большую скорость набегающего потока. А нужен «планерный», позволяющий получить подьемную силу на небольших скоростях — он же за счет изгиба облегчит мах вверх.
Потому что эффективность у вас получается очень низкая — с 1/6 кВт/кг аппарат с пропеллером взлетел бы и без крыльев.
Практика показала, что профиль очень мало влияет на тягу и подъемную силу. В пределах 1-3%. Эти исследования проводились еще в 80-х в МАИ группой В.А. Киселева. А происходит это из-за нестационарного (крупновихревого) обтекания крыльев.
Большие удельные мощности связаны с низким КПД привода крыла. В пределах 25-30% изначальной мощности двигателя. Большая часть энергии тратится на деформацию конструкции и трение. Привод однозначно нужен другой.
Попробуйте на свое крыло хотя бы предкрылки поставить (из полоски картона или тонкого пластика) и померить на стенде потребляемый мотором при махании ток.
Хорошо, что скажет классическая аэродинамика о расположении крыльев на Serenyti — Ааааа! Индуктивное сопротивление, взаимное влияние и пр. И мы тоже так считали поэтому сначала разнесли две пары машущих крыльев на значительное расстояние. А в итоге летать он начал, когда крылья стали стоять друг за другом с минимальным расстоянием. И таких сюрпризов много, например, Су на режимах минимальной скорости равен 4-5 (прямым расчетом) — ну бред же? И с предкрылком группа Киселева игралась, но прибавка в подъемной силе была не значительной.
Видете ли, большая часть крыла махолета находится в постоянном срыве. Т.е. тут лучше использование профилей с затянутым срывом. На деле же это не значительно влияет на подъемную силу. Аэродинамика махолета требует предметного изучения. Мы пока в самом начале. Если бы осуществлять мах адаптивным крылом с переменной круткой и площадью, как у плиц — вопросов нет- вы поавы! Но жесткое крыло ведет себя совсем иначе. Поэтому вопросов к махолетам хоть отбавляй.
Такая «конструкция» в сочетании с гибкой задней кромкой приводит к закручиванию крыла при махе (у птиц это делают мускулы).
Посмотрите на вашу же схему — как меняется угол атаки (белые отрезки). В верхней точке крыло «открывается» набегающему воздуху, а по ходу маха передняя кромка «захватывает» его и отбрасывает вниз и назад (соответственно, сама стрекоза летит вверх и вперед).

Для сравнения, на дельтаплане или планере такого же веса вам понадобится гдето 500ватт. 2л.с достаточно для полноценного пилотируемого.
Мне кажется такой ЛА будет очень дорогим изза сложности механических узлов. Достаточно посмотреть на увеличение цены малых самолетов при наличии убирающегося шасси, или пропеллера переменного шага.
Вот если бы как-то упростить механику, например чтобы длинные гибкие крылья управляемо резонировали… Тогда кстати можно относительно легко сделать чтобы он махал с меньшей амплитудой в режиме горизонтального полета.
Проблемным оказался узел преобразования вращательного движения в возвратно поступательное.…
В качестве силовой установки использовался ДВС,
Вообще-то изначально ДВС работает именно по возвратно-поступательной схеме. Вращательность во многом из-за движителя (колеса) нужна.
Не искали путь прямого использования перемещения пары поршень-шатун для привода крыльев?
Вы хотите лететь, а вес этой одороблы — чуть не полдесятка тонн один цилиндр, и ещё полтонны массивный поршень-«гантеля», если цилиндр монтируемый на свае, или наоборот — сколько-то там весит поршень на свае, а подвижный цилиндр на кране, который звенит как колокол на каждом ударе — те же тонны. Я и говорю — нет общеинженерной подготовки, а прямые аналогии ложны.
Ещё и удар от воспламенения топлива — хоть pV диаграмму глянуть и сравнить с мышечным усилием или даже относительно плавным после редуктора движением шатуна… ума у вас палата, я понимаю. Творите, дерзайте, только любой не то, что учёный, простой инженер ваше творение заслуженно обложит семиэтажно и совершенно непечатно.
— не выйдет, мощи не хватит
— сваи забивать мощи хватает без вращения
— №:%;":%№?% вы лохи необразованные, копер весит 5 тонн, он не полетит
:)
И тут же сравнение удара от воспламенения топлива с мышечным усилием зачем-то. Кстати, в свое время вполне штатно использовались холостые ружейные патроны для запуска тракторов и самолетов, а порох-то порезче топлива будет.
Погуглите "shotgun start" или "coffman starter"
Например вот — https://www.youtube.com/watch?v=4K1OPmYbaDg
Намёк, надеюсь, понятен.
Та же проблема, кстати, с электромоторами. Если окружность электромотора развернуть и вытянуть в линию, получится линейный электропривод. Но так как там мощность тоже умножается на обороты электромотора, то при частоте 1-2 Гц для мощность даже в пару киловатт, потребуется 20-30 кг одних только магнитов. Это печально… Для легкого веса привода нужны высокооборотистые моторы, но возникает проблема редуктора с хорошим КПД. Учитывая мощность в несколько л.с. и коэфф. редукции порядка 100. Не говоря о прочности, чтобы работать с такими огромными выходными моментами (или усилиями) на приводе. Речь про полноразмерный аппарат, но и на моделях тоже все сложно.
Не думаю, что оно у них такое уж неэффективное… При таких размерах, массе и частоте махов, оно напоминает мне работу винтов мускулолетов:

Да, эти винты имеют высокооптимизированные профиль и крутку под стационарную работу, а подводимая мощность всего 300 Вт, что при их скорости полета ~16 км/час, позволяет таким винтам иметь кпд около 85%. Но принципиально картина похожа, мне кажется. Конкретно эти махолеты стоит рассматривать скорее с винтовой теории (импульс, прокачиваемый объем воздуха через ометаемую крыльями-лопастями поверхность, вот это все). Они летят, по сути, почти целиком за счет такого странного тихоходного винта, а от самолетного планирования там меньшая часть. Ну, так кажется со стороны. Я по опыту знаю, что делать точные замеры в таких проектах очень сложно. А догадки по большей части носят спекулятивный характер.
То, что сейчас у них движительный кпд, вероятно, в несколько раз ниже достижимого в теории — это нормально. Это можно в будущем улучшить. Главное, что это работает. Ребята проделали отличную работу.
Но возможно, эти крылья у них уже сейчас очень хороши и эффективны. Мы же не знаем, какая реальная механическая мощность к ним подводится после редуктора. К примеру, мало кто знает, но самые первые винты на самолете братьев Райт, когда еще никакой винтовой теории не существовало, а винты разработчиками рассматривались как "воздушные весла", имели на удивление высокий КПД, на уровне 80%. Все из-за маленькой удельной нагрузки, там действительно профиль имеет не такое уж большое значение. В смысле, разница между разными профилями в таких условиях небольшая, больше важна просто площадь крыла/лопасти, а на аэродинамическое качество влияет прежде всего удлинение (там почти линейная зависимость К от удлинения). Хотя со специфическими ламинарными профилями можно добиться большего, конечно, но только под очень узкий режим работы. А в общем диапазоне будет примерно так же, как и с остальными профилями. Здесь удельная нагрузка на крылья тоже кажется относительно небольшой. Поэтому от профиля вряд ли много зависит. Любой обычный сойдет, вроде классических Clark-Y или RAF-6 с любой разумной относительной толщиной (5-20%).
А крылья им нужны не как винт на фото — а как крылья. Такая конструкция, с несколько провисающей материей, создает эффект парашюта и гораздо более эффективна при околонулевой поступательной скорости (она же скорость набегающего потока). У большинства птиц же крылья имеют вогнутую форму и передняя кромка ниже задней. И распрямляются они только при планировании на большой скорости. У самолетов так же — пред- и закрылки выдвигаются вниз, не давая воздуху «убежать» из-под крыла на небольших скоростях и предотвращая тем самым сваливание. И работает это столь эффективно, что без интерцепторов — открывающихся окон в крыле — самолет просто «отказывается» садиться.
Точные замеры делать очень просто — достаточно измерить ток мотора, закрепив модель на стенде и дав одну и ту же частоту (процент газа).
Нет, это не совсем так. Нужна механическая мощность именно на крыльях, то есть на них нужно поставить тензодатчики и измерять изгибающее усилие на лонжероне, или вроде того. Плюс частоту махов, в сумме это даст мощность на крыльях. Именно так измерялась мощность махов у птиц, среди прочих методов. Им в кость вживляли тензодатчики.
С электромотором тоже не просто… При большой нагрузке на заторможенном моторе ток может превышать раза в два номинальное значение, а ведь измеряется именно ток. Только в этом режиме кпд электромотора может падать на 30% и более. И опять получим пальцем в небо. Погрешность измерения в десятки процентов. Про редуктор даже не говорю, с ним вообще сложно, только на специальном стенде.
Лучше всего измерять мощность махов прямо в полете! Зная, что махи делаются против силы гравитации (шарниры крыльев позволяют им махать только вверх-вниз), и что в горизонтальном полета суммарная подъемная сила равна взлетному весу аппарата, и что равнодействующая вектора подъемной силы расположена примерно на 50-60% размаха крыльев, по их вертикальным перемещениям и частоте махов можно довольно точно найти затрачиваемую махолетом мощность на полет. Так еще Отто Лилиенталь делал в своей книжке про искусство летать на примере аиста и других птиц. Это довольно очевидная механика.
Гм… По-моему, нет… Ведь кпд и означает, что при одинаковом токе, при более высоком кпд аэродинамика будет лучше — летательный аппарат будет быстрее лететь. Либо быстрее набирать высоту.
То есть, возможна ситуация, когда ток будет одинаков, а летные характеристики разные. При разном кпд машущего привода. Скорее надо как-то зафиксировать летные характеристики, например измерения проводить при одинаковой скорости горизонтального полета. Где меньше будет ток на моторах, тот профиль эффективнее. Но тут тоже сложно, потому что разные профили могут иметь максимум эффективности на разных скоростях полета. Да так и есть — точка макс. аэродин. качества на поляре зависит от угла атаки и числа рейнольдса. А последний, в свою очередь, зависит от скорости полета и размеров крыла. Аэродинамика тем и интересна, что с одной стороны, она очень простая (в ней не было существенных открытий с 30-х годов прошлого века), но с другой, очень разнообразная. И зависит от множества факторов.
Здорово, что вы это смогли понять по видео!
P.S. На выводы это не влияет, но чисто ради перфекционизма.
И к лошадиным силам торричеллиева пустота тоже никаким боком :(((
И с лошадиными силами множитель 9,81 вкрадывается, получая из 1 лошадиной силы (которая 75 килограммометров в секунду) 736 ватт. Поэтому pVn/450 в л.с., pVn/612 — в киловаттах.
Всё пропорционально — просто обороты-то в минуту, множитель 60, а давление в килограммах силы на квадратный сантиметр, а не в ньютонах на квадратный метр (и там ещё куча нулей с разных сторон) — соответственно будет 6 000 / 9,81, примерно 612.

И моё дилетантское мнение — не нужно пытаться делать на ДВС, благо сейчас электро развивается очень мощно, новые аккумуляторы и т.п., а ДВС уже выжат и перспектив нет. Может, только в будущем на очень больших дронах.
надо сделать типовую простую и недорогую игрушку-махолёт, запатентовать, навесить на неё 4k камеру с VR и продавать её на всех крупных площадках.
Да-да, это как братьям Райт посоветовать сразу делать 180 тонный самолет на 300 пассажиров. Тогда он будет экономически целесообразным и быстро окупится ))
Есть же стрекозы, в США делали.
С планированием даже у этого большого траблы, уже ж писали. А малый будет планировать где-то как листик клена.
А на счет аэродинамики это уже от авторов зависит. Птицы размером с воробья не так уж быстро машут крыльями, да и планировать худо-бедно умеют.
во первых, трясется
Строго говоря, махолет трястись не обязан. Он же находится в воздухе. Его тряска — это изменение положения центра масс (считаем, что пилот находится в нем). А положение центра масс у летящего аппарата изменяется, в основном, от аэродинамических сил.
Достаточно во время полета обеспечивать одинаковую подъемную силу во время махов, и ничего трястись не будет. Это можно сделать, например, когда центроплан работает как неподвижное крыло, а концевые части при махах создают только тягу. Сохраняя у себя вертикальную составляющую подъемной силы постоянной. И такой махолет будет лететь ровно, как самолет. Собственно, птицы тоже почти не колеблются, если сравнивать с развиваемыми их мышцами усилиями и затрачиваемой мощностью. Еще одна причина колебаний — чисто динамическая, за счет взаимодействия движущихся частей. Но и ее можно компенсировать аэродинамическими силами. Так что с этим у махолетов, в теории, все не так уж плохо.
Давайте для тех, кто еще не знает как это работает, максимально упростим махолетную теорию. Вот летит безмоторный дельтаплан. Он снижается относительно воздуха с некоторой скоростью, скажем, 1.1 м/с (типичная скорость снижения, бывает и меньше, например 0.9 м/с). Если дельтаплан вместе с пилотом имеют массу 100 кг (70 кг пилот и 30 кг дельтаплан), то переводим ее в ньютоны и по формуле N = m * v получаем, что гравитация "дает" на его полет мощность N = 100 кг * 9.8 кг*м/с2 * 1.1 м/с = 1078 Вт.
Аэродинамические силы зависят от скорости набегающего потока квадратично. Увеличив скорость снижения в 1.4 раза, подъемная сила на крыле вырастет в 2 раза. Ну а дальше очевидно — давайте как-то заставим половину времени крылья опускаться относительно воздуха в 1.4 раза быстрее, чем они делают это обычно. За это время своим центром масс наберем высоту (раз подъемная сила получится в 2 раза больше, чем обычно). А остальное время будем просто планировать с нее, как обычно. Заодно медленно опуская крылья.
Короче, берем любой дельтаплан или самолет, заставляем его махать крыльями для обеспечения скорости снижения крыльев в 1.4 раза (а лучше в 2, чтобы с запасом) быстрее, чем они снижаются на безмоторном планировании. И такой самолет полетит как махолет, куда он денется… Если посмотреть на крупных птиц, у них так и есть.
Сколько же нужно мощности на такой машущий полет? Потребуется на столько больше по сравнению с планированием, на сколько второй режим (снижение с 1.4 большей скоростью) по аэродинамике хуже, чем просто планирование. Если посмотреть на поляры крыльев, вроде дельтапланерных, то там разница от силы 5-10%. Ну еще накинем немного на переходные процессы при смене направления маха (хотя они пренебрежимо малы, так как горизонтальная скорость набегающего потока в 5-15 раз выше, т.е. ровно в качество К крыла раз, чем вертикальная снижения при махах). Итого, получаем, что кпд махолета как механизма, создающего за счет махов тягу для полета, должен находиться в районе 90-95%. Что и неудивительно, ведь это по сути планирующий полет, с лишь чуть измененным в худшую сторону режимом.
То есть, для горизонтального полета тому машущему дельтаплану потребуется в идеальном случае электромотор около 1200 Вт. У хорошего бесколлекторника с крупным диаметром кпд около 90-95%, плюс у контроллера на уровне 95%, хотя на такой мощности может быть и 98%. И механический кпд привода может быть на уровне 98% (взяв в качестве линейного привода, например, полутораметровой длины ВШП, который представляет собой, по сути, подшипник). Итого, реальная мощность электромотора потребуется 1400 Вт. Это очень маленькая мощность, можно летать от батареек. Ниже гравитационных 1078 Вт никак не может быть (нестационарные явления, якобы снижающие мощность по сравнению с планированием, это сказки, подтверждения им нет). Необходимая мощность для моторного полета всегда будет выше мощности планирования, причем ровно на КПД движителя. Для сравнения, моторные дельтапланы имеют кпд винтов около 35%, девайсы с меньшей удельной нагрузкой (ранцевые мотопарапланы), примерно 40-45%.
Таким образом, при размере с дельтаплан, на махолете можно выиграть максимум в два раза по необходимой для полета мощности. Что также означает в два раза меньшую массу мотора и в два раза дешевле. А остальные преимущества могут быть только в потенциальной бесшумности/малошумности, так как основной шум в ЛА всегда от винта. И, может быть, чуть большую безопасности вблизи, из-за отсутствия быстро вращающегося винта рядом с телом пилота.
Но это в идеале. Первые прототипы, конечно, могут затрачивать в несколько раз больше мощности, чем мощность планирования. Из-за низкого кпд механического привода и из-за того, что вряд ли удастся сразу подобрать повороты крыла, чтобы попадать в оптимальные углы атаки относительно набегающего потока. Но было бы очень интересно посмотреть скорость снижения этих построенных махолетов в режиме планирования, и сравнить с затрачиваемой мощностью на горизонтальный полет. Сразу будет видно, есть ли куда улучшать аэродинамику — настраивать углы поворотов крыльев и т.д.
Это подозрительно.
1) потому что так проще считать\прикидывать «на пальцах».
2) а что именно вас смущает в дельтапланах?
Это был полностью модельный пример, всё ок.
А смутило меня то, что аэродинамика дельтаплана это не топ того, что может предложить промышленность. С практической стороны не увидел смысла в сравнении с дельтой7 Аэродинамическое качество современного планера в 2-4 раза выше, чем у дельтаплана. Вместо маха крыльями, можно совместить аэродинамику планера с современным мотором и за счёт этого лететь дальше/дешевле обычного самолёта. И это успешная схема, что доказывается наличием готовых промышленных решений. Например Pipistrel Virus/Surveyor (есть и электровариант). И это не модель, это полноценный ЛА, с современной авионикой, сертифицированный для инструментального полёта.
Почему вы используете дельтаплан, как модельный пример?
Дельтапланы и парапланы по удельной нагрузке на крыло и числу Рейнольдса ближе всех к птицам. Поэтому сравнивая с птичьим машущим полетом, логичнее всего брать параметры этих летательных аппаратов.
Ну в момент маха будет увеличенная нагрузка на конструкцию, что приведет к увеличению веса дельтаплана, что приведет к общему ухудшению его характеристик.
А еще есть расчетная характеристика «нагруженнось крыла», тут их будет 2, тоесть как минимум меньше оптимальность конструкции при расчете.
Так же непонятно, почему КПД будет 90%. Скорее будет не больше чем у винта той же ометаемой площади.
Вот из-за этого ухудшения характеристик, расход топлива и должен быть выше "идеальной" гравитационной мощности на планировании, все верно. Это и определяет кпд махолета.
Срыва потока не будет. Птицы действительно на махе вниз могут выдерживать угол атаки порядка 23 градусов, на околосрывных режимах. Но у них намного меньше числа Рейнольдса, там это нормально. Для полноразмерного махолета, по грубым прикидкам, должно быть достаточно изменения угла атаки при махах на 5-10 градусов, максимум на 15. Это далеко от срывных режимов. Которые на их профилях начинаются где-то с 18 градусов. Такое изменение постоянно делается и на дельтапланах, и на парапланах во время штатного полета. На первых при маневрировании, на вторых при вытягивании акселератора.
Так же непонятно, почему КПД будет 90%
Ну смотрите, на крыло навстречу набегает поток 15 м/с (~50 км/час), а само крыло опускается относительно воздуха со скоростью 2 м/с. В 7 раз медленнее. Даже если вы за 0.1 сек измените угол поворота, это всего ли 1/7 часть того потока, что попадет на крыло. В общем, было бы несущественно, даже если там был бы срыв потока при смене направления маха. А его там нет. Поэтому махи вверх и вниз — это просто работа на разных участках поляры крыла. Судя по существующим полярам, это разница в эффективности около 10%. Отсюда и ожидаемый аэродинамический кпд махолета порядка 90%. Да и измеренный инструментально у птиц, примерно такой же.
Скорее будет не больше чем у винта той же ометаемой площади.
Кстати, это совершенно верно! У винта с диаметром как размах крыльев (7-10 м), кпд тоже будет близок к 100%. Даже меньше достаточно, порядка 4-5 м, из-за того что площадь круга больше, чем ометаемая крыльями при махах. Собственно, это не просто теория, это давно проверено и измерено на практике. На самолетах-мускулолетах (масса конструкции 40 кг, размах ~30 м) с потребной для полета мощностью в 350 Вт, используются винты с диаметром 3.5 м. И их измеренное кпд составляет 85-90%.
Так что если есть возможность сделать большой тихоходный винт (для дельтаплана это диаметром 3-4 м), то в плане экономичности необходимости в махолетах нет. Такой винт будет так же эффективен и близок к теоретическому пределу.
На самом деле не должно отличаться от очень большого винта в вертолете. И проблемы те же — не из чего сделать винт, чтоб ему не поплохело при таких размерах, разница скоростей обтекания на разных участках конструкции и либо сверхзвук на краях, либо малая управляемость.
Только добавляется еще и турбулентность вокруг крыла.
Потенциально махолёт имеет существенно большее кпд движетеля чем воздушный винт
Справедливости ради, у легкомоторных самолетов на скоростях выше 150 км/час, кпд обычного винта 70% совсем не редкость, а возможно бывают и под 85%. Собственно, это и есть основная причина, почему махолеты не пытались делать в качестве коммерческой авиации. Тут в комментариях спрашивали. Любому авиационному инженеру из самых базовых физических принципов понятно, что для самолетов толку в этом особого нет. Винт в этом режиме и так прекрасный движитель (кроме шума). И конструктивно в тысячи раз проще. Это только у медленно летающих аппаратов <100 км/час проблема с аэродинамической эффективностью движителей.
С другой стороны, сейчас становятся актуальными короткий взлет и посадка. А это для махолетов уже интересно. И вычислительные ресурсы уже, теоретически, позволяют делать птичью посадку в точку, маша крыльями на околосрывных режимах.
Что-то возникает подозрение, что оно летит за счет стабилизаторов как крыльев. А машущие части просто странный движитель.
1) За счет чего управляется FlapFlyer? Хвостовое оперение или изменение угла атаки крыльев?
2) При остановке двигателя, крылья останавливаются в случайном положении, в общем случае выглядит так, что симметрия нарушается(судя по видео). Как это сказывается на управляемости и возможности планирования и что с этим предполагается делать?
2. В задумке должны устанавливаться в нулевой угол, пока не довели до ума. Но при остановке крыльев скорость снижения все равно высоковата. Нужно работать над улучшением параметров аэродинамического качества для остановленных крыльев.
На правах бредовой шутки: интересно, а когда-нибудь человечество придёт к тому, чтобы создавать летательные аппараты на основе генетически модифицированных птиц (способных впадать в анабиоз) у которых мозг будет контролироваться компьютером оснащенным GPS.
даже для индивидуальной леталки нужна грузоподъёмность в 120-150 кг. Плюс вес самой птички.
Т.е на каждое крыло где-то 150-200 кг.
Проще делать химеру с нуля, да и рацион будет специфический.
Для атракционов ещё ладно, в массе — особого смысла не видно.
Самая крупная летающая птица — аргентавис, имела размах крыльев около 7 метров и вес порядка 70 килограмм.
- Розовый пеликан (Pelecanus onocrotalus) — вес около 15 кг размах крыльев — 3,8 м.
- Королевские альбатросы, вес около 11 килограмм, размах крыльев — 3,7 метра.
- Лебедь-шипун (Cygnus olor) – вес около 20-23 кг, размах крыльев — 2,5 метра.
Т.е., для такой леталки размах крыла метров под 30-50 (у дельтапланов 8-10 метров), куча сердец, центры синхронизации нервных импульсов.
Взлетать оно, скорее всего, сможет только с рампы.
Несколько лет назад я тоже интересовался темой махолетов. Даже собрал из соплей и палок простенький прототип из одних лонжеронов. Там авиамодельный электромоторчик просто сматывает на вал боковые тросы, а резиновые жгуты возвращают крыло наверх.

Управление мотором было вручную сервотестером (поворот рычажка). Выяснилось, что вручную включать и выключать мотор нереально — слишком быстро все происходит. И что у стандартных авиамодельных контроллеров для моторов без датчиков холла слишком плавный режим разгона, до рабочих оборотов за ~0.6 сек, что маловато. Позднее я перепрошил его на мультикоптерную прошивку SimonK, и он стал выходить на рабочие обороты за ~0.1 сек. И добавил энкодер оборотов, чтобы автоматизировать махи. В принципе, учитывая что в пике у этого электромотора (Rotomax 150cc) мощность заявлена до 8 кВт, то даже с учетом кратковременных включений/выключений и времени на разгон/торможение, можно было рассчитывать на среднюю мощность порядка 2-4 кВт. Что имело бы шанс взлететь. К сожалению, к тому времени интерес к этой теме у меня уже пропал, поэтому я больше не пытался это сделать. Хотя надо бы довести хотя бы в беспилотном варианте, прикольно же)
Ниже видео первых (и единственных) испытаний. Где мотор еще включался и выключался вручную сервотестером. Размах "крыльев" то ли 8, то ли 9 метров, не помню точно.
А тут подробнее, если кому интересно. Извиняюсь за небольшой вынужденный нудизм, в то время стояла жара, а снималось чисто для себя.
Похоже, Тео Янсену при конструировании его ходячих машин приходилось решать подобную задачу, с тем чтобы передать вращательное усилие в возвратно-поступательное с минимальными потерями и вибрацией.
youtu.be/BP9fNMkdVOU?t=96
А пробовали ли сделать так, чтобы крыло не останавливалось после опускания вниз, а проходило под корпусом, изменяя угол атаки в нужный момент? Это позволит вращаться крылу постоянно, только изменяя угол атаки. Разумеется, что таких колец нужно минимум два или четыре. Может это позволит сделать крылья более короткими и крепкими, так как частота и скорость маха будет выше. А на каждом кольце можно разместить два или больше крыльев
А пробовали ли сделать так, чтобы крыло не останавливалось после опускания вниз, а проходило под корпусом, изменяя угол атаки в нужный момент?
Такое не знаю, но есть достаточно хорошие результаты с двумя группами крыльев, каждая из которых имеет фиксированный угол атаки.
Группа 1: большие жёстко закреплённые крылья, с зеркальным углом атаки относительно фюзеляжа.
Группа 2: небольшие крылья, вращающиеся вокруг оси фюзеляжа.
Чтобы Группа 1 и Группа 2 не мешали друг-другу, их разносят вдоль оси фюзеляжа. Обычно, Группа 2 находится ближе к носу.
вон там делают не менее сложное и говорят взлетит https://habr.com/ru/news/666380/
то есть современные технологии позволяют углом атаки играть много раз в секунду
или есть какое-то ограничение, почему не получится махать крыльями полными оборотами вокруг себя и лететь куда надо?
Ограничение в том, что в махолётах периодические нагрузки, а в описанной мной схеме - всё достаточно просто.

Извините, если выгляжу навязчивым, но не понимаю ответа
Вот на первых видео в теме аппарат машет крыльями вниз, потом вверх
Почему он не продолжает дальше вниз под себя под брюхо вместо вверх?
Ему всего лишь надо под собой чуть повернуть крыло, чтобы оно из машущего превратилось в, грубо говоря, тянущий/толкающий винт, а как будет наверху - снова повернуться обратно, чтобы из винта стать машущим вниз (то есть поднимающим вверх аппарат) крылом.
Почему так не делают?
Группа 1: большие жёстко закреплённые крылья, с зеркальным углом атаки относительно фюзеляжа.
Группа 2: небольшие крылья, вращающиеся вокруг оси фюзеляжа.
Это же обычный самолёт, не? неподвижные крылья и винт
Мой комментарий о следующем.
Вы берёте подвижную аэродинамическую поверхность и она двигается то вверх, то вниз. При этом, чтобы двигаться в одном направлении, угол атаки этих элементов должен перекладываться на зеркальный.
Но разворачивать элемент можно по разному и получается, что под этот же принцип попадает простой пропеллер, у которого угол атаки, относительно горизонтали, разный при движении лопасти вверх и вниз.
Проблемы просто нет и всё.
Почему так не делают?
Возьмите длинную гибкую палку, выставьте перед собой и начните вращаться.
На палку действует набегающий поток воздуха, который её изгибает.
Теперь сделайте то же самое, только в дополнение начните качать палку вверх-вниз.
На палку начнут действовать периодические нагрузки, которые либо сразу сломают палку, либо, если она будет достаточно крепкая, сломают её через какое-то время из-за усталости материала.
Вобщем, винт можно вращать на 3 тысячах оборотов в минуту, а машущее крыло нельзя дёргать с такой частотой.
Вспомнился Задорнов - "Хлопай ресницами и взлетай...", при обычном размере ресниц он насчитал ЕМНИП два миллиона взмахов в секунду - не зря же моргательные мышцы самые быстрые. Ему можно верить, он авиационный заканчивал.
Так сколько осталось ждать орнитоптеров, или хотя бы стрекоз как в новой Дюне? Или по образцу Лекса просто взять и вырастить их?

Сказ о том, как махолетчики за старое взялись