Введение
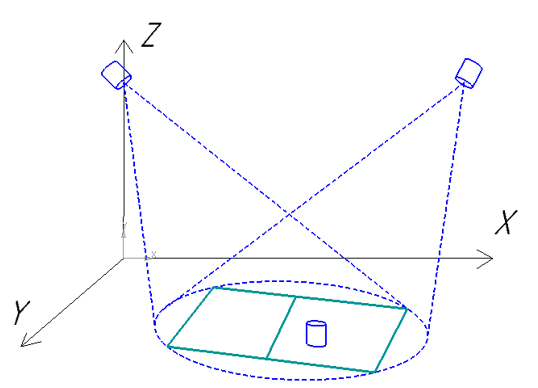
На Habr математическое описание работы фильтра Калмана и особенности его применения рассматривались в следующих публикациях [1÷10]. В публикации [2] в простой и доходчивой форме рассмотрен алгоритм работы фильтра Калмана (ФК) в модели «пространства состояний», Следует отметить, что исследование систем контроля и управления во временной области с помощью переменных состояния широко используется в последнее время благодаря простоте проведения анализа [11].
Публикация [8] представляет значительный интерес именно для обучения. Очень эффективен методический приём автора, который начал свою статью с рассмотрения распределения случайной погрешности Гаусса, рассмотрел алгоритм ФК и закончил простой итерационной формулой для подбора коэффициента усиления ФК. Автор ограничился рассмотрением распределения Гаусса мотивируя это тем, что при достаточно больших
(многократных измерений) закон распределения суммы случайных величин стремится к распределению Гаусса.
Теоретически такое утверждение, безусловно, справедливо, однако на практике число измерений в каждой точке диапазона не может быть очень большим. Сам R. E. Kalman получил результаты о минимуме ковариации фильтра на базе ортогональных проекций, без предположения о гауссовости ошибок измерений [12].
Целью настоящей публикации является исследование возможностей фильтра Калмана для минимизации энтропийного значения случайной погрешности с не Гауссовым распределением.
Для оценки эффективности фильтра Калмана при идентификации закона распределения или суперпозицией законов по экспериментальным данным воспользуемся информационная теорией измерений основанной на теории информации К. Шеннона, согласно которой информация, подобно физической величине, может быть измерена и оценена.

 Доброго времени суток, дорогие хабрахабровцы!
Доброго времени суток, дорогие хабрахабровцы!