Rhasspy — опенсорсный и полностью офлайновый речевой тулкит. Распознавание русского языка. Никаких утечек в облако
3 мин
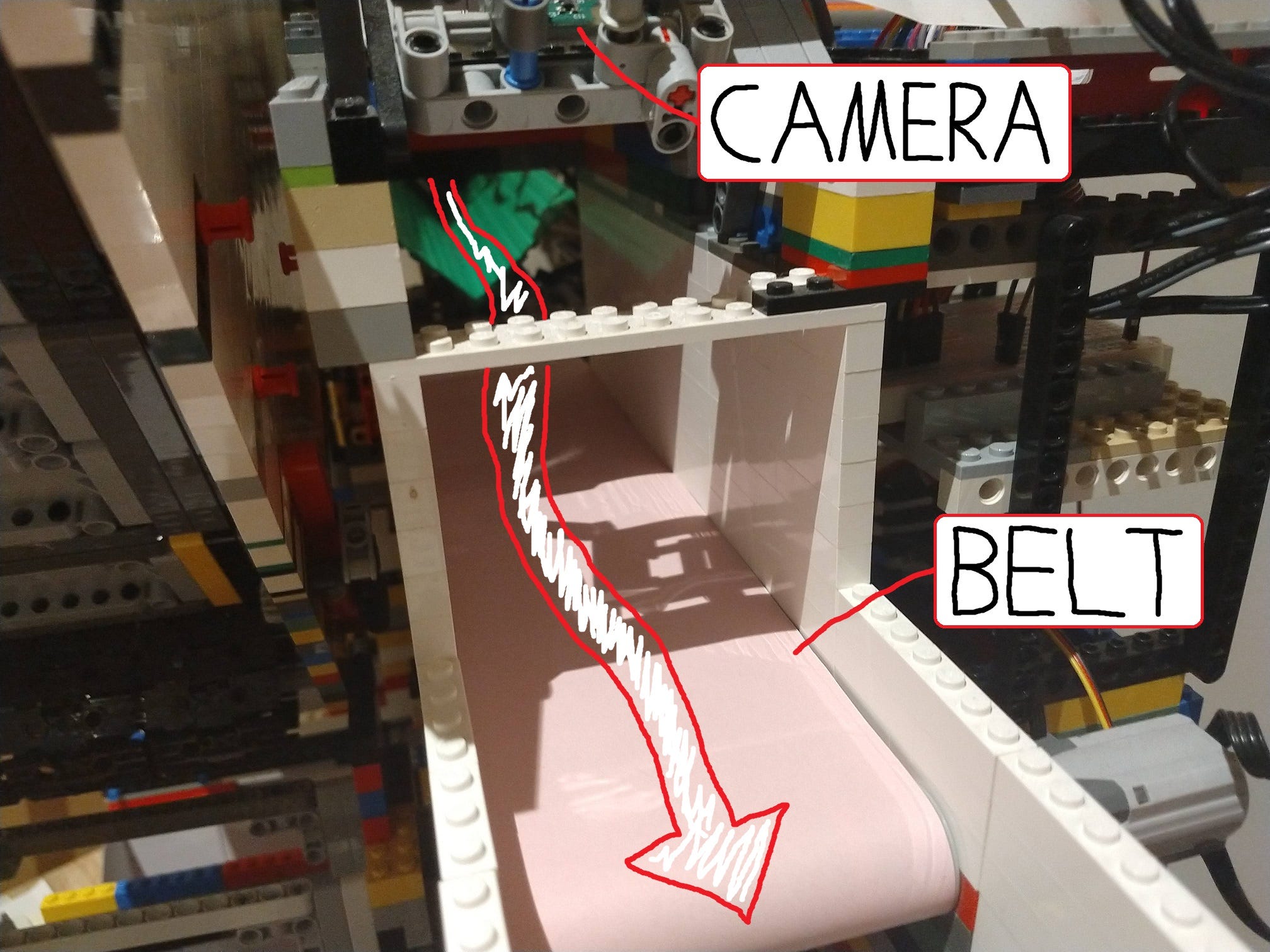
Фото из сравнения микрофонных массивов для DIY-устройств типа самодельной умной колонки
Системы вроде Amazon Echo передают в облако для хранения ваши конфиденциальные разговоры (даже записанные случайно). В некоторых случаях записи прослушиваются живыми операторами. Это не просто потеря конфиденциальности. Это как добровольно впустить в свою квартиру «товарища майора», который стоит рядом 24 часа в сутки, слушает и внимательно записывает, притворяясь услужливым ассистентом.
Вместо покупки коммерческой системы у корпораций типа Google, Amazon или «Яндекс», вы можете собрать аналогичную опенсорсную систему на базе Raspberry Pi 2-3 B/B+, персонального компьютера или ноутбука.
Rhasspy — безопасный голосовой помощник, который работает автономно. Он ничего не передаёт на удалённые сервисы, при этом успешно справлятся с распознаванием речи и голосовых команд.