Использование модулей электропитания с соблюдением стандартов MIL-STD-1275 и MIL-STD-461F
Аннотация
В статье рассматриваются основные требования к электромагнитным помехам и изменению напряжения при переходных процессах, которые предъявляются к системам специального назначения, использующим импульсные источники питания (SMPS). Особое внимание уделяется основным условиям при подавлении электромагнитных помех и переходных колебаний, а также методам по обеспечению соответствия стандартам.
Введение
Инженеры разработчики электронной техники сталкиваются с различными проблемами, связанными с изменением напряжения в переходном процессе и устранением электромагнитных помех. При недостаточном контроле возникновения электромагнитных помех может привести к наложению их на полезный сигнал, что в свою очередь приводит к возникновению нежелательного шума в коммуникационном или компьютерном оборудовании, а также к ложному срабатыванию и неправильным показаниям в цепях сенсорных датчиков.
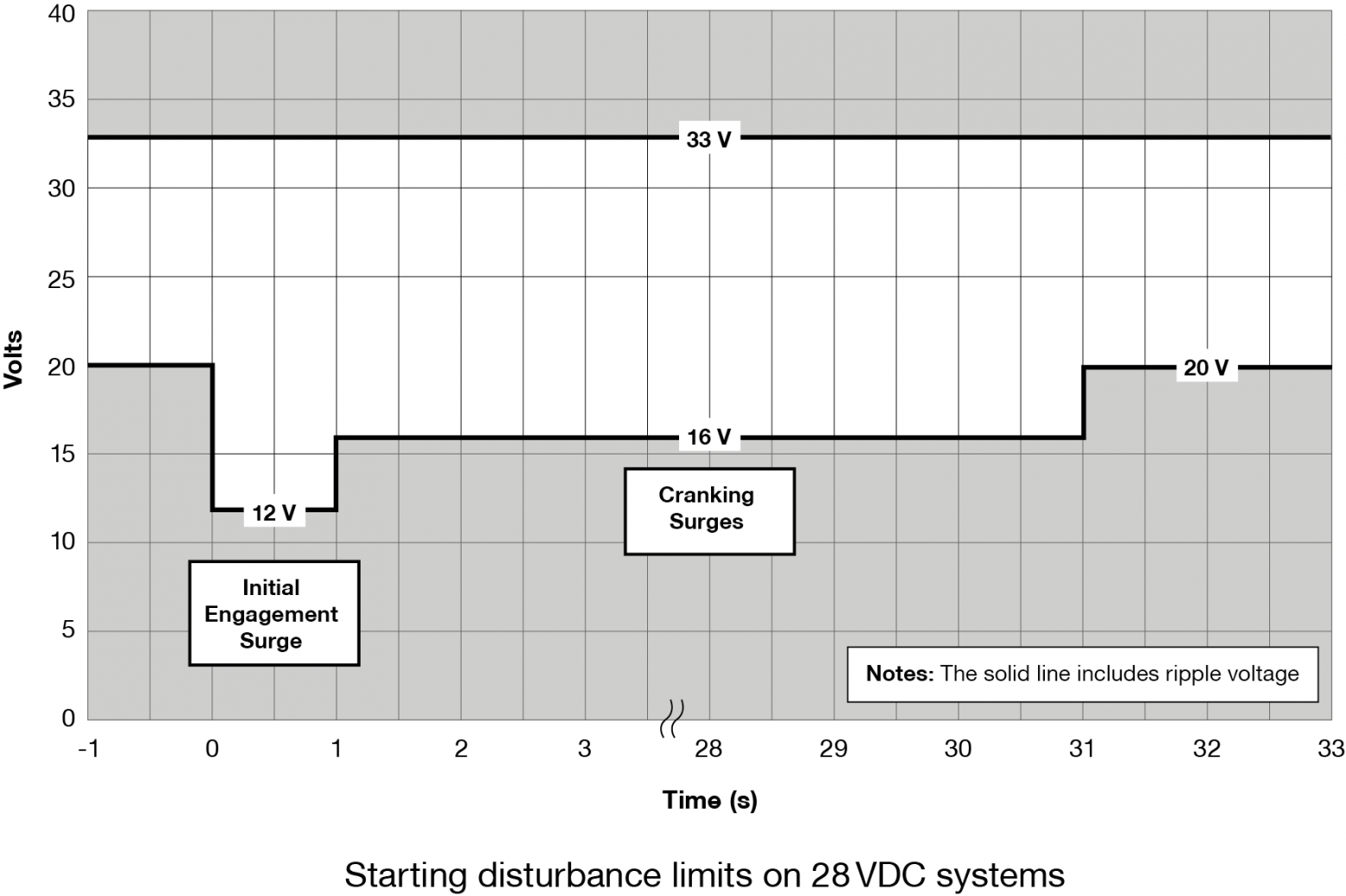
Дополнительно к сигналам, которые могут вызвать наложение помех, при нормальной работе оборудования могут возникать изменения напряжения, связанные с переходными процессами на входных клеммах оборудования. Изменения напряжения в переходном процессе определены в соответствующих отраслевых стандартах и рассчитываются с учетом конкретных условий, в которых используются различные классы оборудования. Например, требования к наземному оборудованию отличаются от требований к летному бортовому оборудованию.
Одна из задач инженера-разработчика — своевременная корректировка схемы для снижения электромагнитных помех и изменения напряжения в переходном процессе в разрабатываемом оборудовании, к которому предъявляются требования, определяемые потребителем.