Однажды в институте зав кафедры рассказывал нам о нашей будущей профессии:
“Наша профессия очень важна и ответственна. Сейчас вы работаете над обликом будущего флагмана Российской авиации. Вы сыпете идеями, пытаетесь предугадать задачи, которые он будет решать, берете на себя ответственность и принимаете решения. А через 15 лет, когда самолет наконец построят, всем будут раздавать почести, но про вас уже никто не вспомнит”.
Такая агитация мне не понравилась, ждать 15 лет результата я не готов.
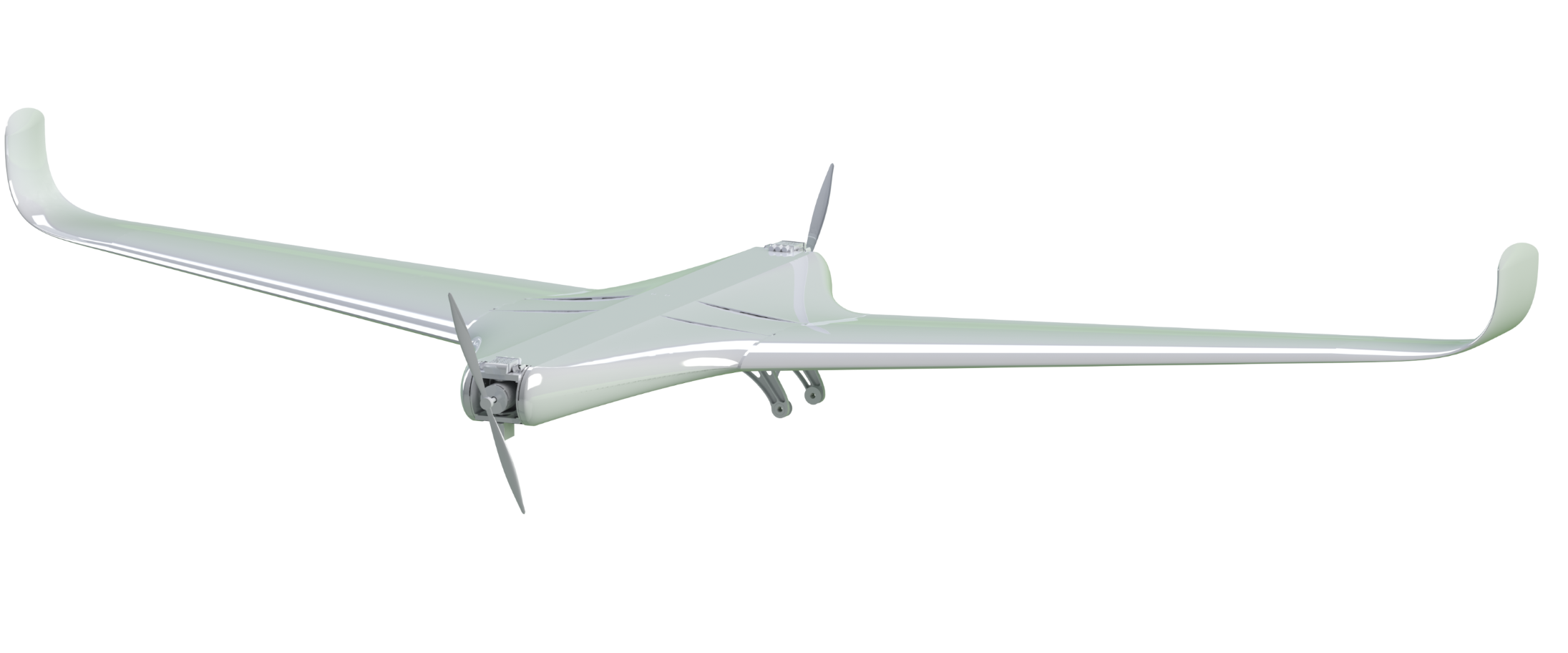
Авиация — высокоразвитая отрасль, но высокие требования по надежности и распланированное будущее не позволяют внедрять новые технологии быстро. А беспилотникам же наоборот, никаких особых требований пока нет, вот они и растут как грибы после дождя, заполняя собой ниши авиа мониторинга, рекламы, помощи сельскому хозяйству, видеосъемки и подобные.
Так я и решил, пускай они там как-нибудь без меня строят свои истребители, а я, пока молод и горяч, пойду в беспилотники. Благо что авиамодельное прошлое имеется.













 Представляю вашему вниманию материалы одноименного доклада, сделанного мной на конференции
Представляю вашему вниманию материалы одноименного доклада, сделанного мной на конференции