Привет, Хабр! Продолжаем серию материалов от выпускника нашей программы Deep Learning, Кирилла Данилюка, об использовании сверточных нейронных сетей для распознавания образов — CNN (Convolutional Neural Networks).
В прошлом
посте мы начали разговор о подготовке данных для обучения сверточной сети. Сейчас же настало время использовать полученные данные и попробовать построить на них нейросетевой классификатор дорожных знаков. Именно этим мы и займемся в этой статье, добавив дополнительно к сети-классификатору любопытный модуль — STN. Датасет мы используем
тот же, что и раньше.
Spatial Transformer Network (STN) — один из примеров дифференцируемых LEGO-модулей, на основе которых можно строить и улучшать свою нейросеть. STN, применяя обучаемое аффинное преобразование с последующей интерполяцией, лишает изображения пространственной инвариантности. Грубо говоря, задача STN состоит в том, чтобы так повернуть или уменьшить-увеличить исходное изображение, чтобы основная сеть-классификатор смогла проще определить нужный объект. Блок STN может быть помещен в сверточную нейронную сеть (CNN), работая в ней по большей части самостоятельно, обучаясь на градиентах, приходящих от основной сети.
Весь исходный код проекта доступен на GitHub по
ссылке. Оригинал этой статьи можно
посмотреть на Medium.
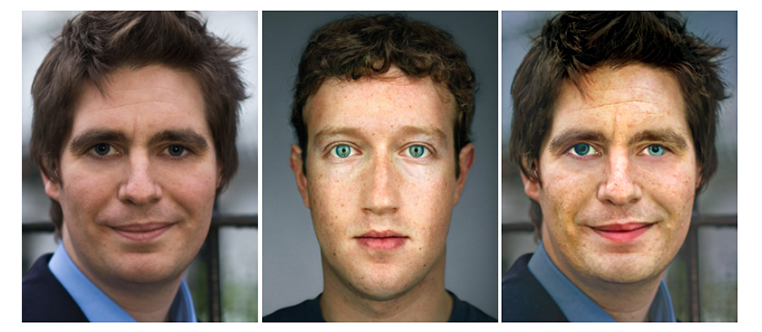
Чтобы иметь базовое представление о работе STN, взгляните на 2 примера ниже:
Слева: исходное изображение. Справа: то же изображение, преобразованное STN. Spatial transformers распознают наиболее важную часть изображения и затем масштабируют или вращают его, чтобы сфокусироваться на этой части.