Создать управляемый в реальном времени контроллер для виртуальных персонажей — сложная задача даже при наличии большого количества доступных высококачественных данных захвата движения.
Частично это связано с тем, что к контроллеру персонажей предъявляется масса требований, и только при соответствии им всем он может быть полезным. Контроллер должен уметь учиться на больших объемах данных, но при этом не требовать большого количества ручной предварительной обработки данных, а также должны максимально быстро работать и не требовать больших объемов памяти.
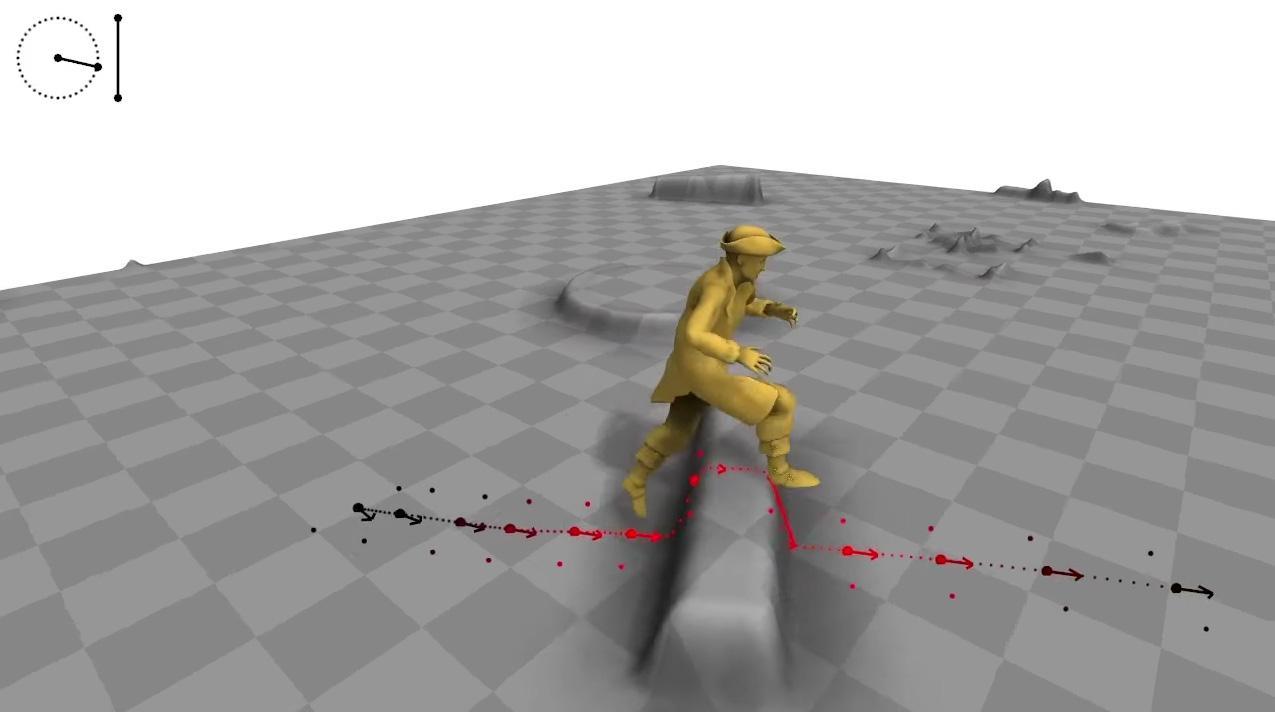
И хотя в этой области уже достигнут некоторый прогресс, почти все существующие подходы соответствуют одному или нескольким из этих требований, но не удовлетворяют им всем. Кроме того, если проектируемая местность будет иметь рельеф с большим количеством препятствий, это еще серьезнее усложняет дело. Персонажу приходится менять темп движения, прыгать, уклоняться или взбираться на возвышенности, следуя командам пользователя.
При таком сценарии нужна система, которая может учиться на основе очень большого количества данных о движении, поскольку существует очень много разных комбинаций траекторий движения и соответствующих геометрий.
Разработки в области глубинного обучения нейронных сетей потенциально могут решить эту проблему: они могут учиться на больших наборах данных, и однажды обученные, они занимают мало памяти и быстро выполняют поставленные задачи. Остается открытым вопрос о том, как именно нейронные сети лучше всего применять к данным движения таким образом, чтобы получать высококачественный результат в режиме реального времени с минимальной обработкой данных.
Исследователи из
Эдинбургского университета разработали новую систему обучения, называемую фазово-функциональной нейронной сетью (PFNN), которая использует машинное обучение для анимации персонажей в видеоиграх и других приложениях.