Лекции по курсу «Управление Техническими Системами» читает Козлов Олег Степанович на кафедре «Ядерные реакторы и энергетические установки» факультета «Энергомашиностроения» МГТУ им. Н.Э. Баумана. За что ему огромная благодарность!
Данные лекции готовятся к публикации в виде книги, а поскольку здесь есть специалисты по ТАУ, студенты и просто интересующиеся предметом, то любая критика приветствуется.
В других сериях: 1. Введение в теорию автоматического управления.
2. Математическое описание систем автоматического управления 2.1 — 2.3, 2.3 — 2.8, 2.9 — 2.13.
3. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЗВЕНЬЕВ И СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕГУЛИРОВАНИЯ.
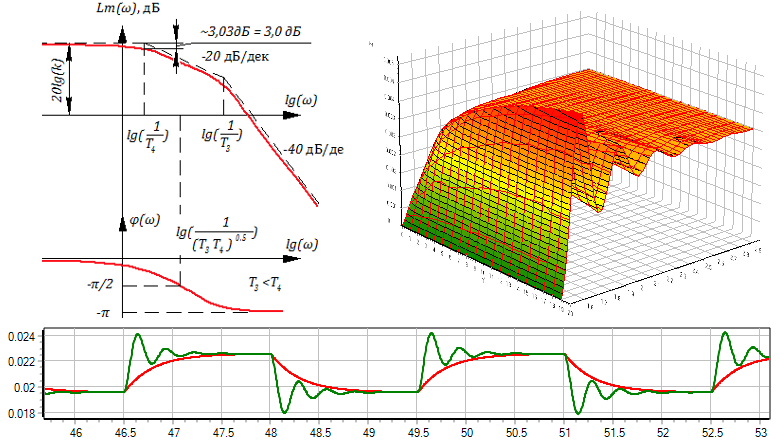
3.1. Амплитудно-фазовая частотная характеристика: годограф, АФЧХ, ЛАХ, ФЧХ.
3.2. Типовые звенья систем автоматического управления регулирования. Классификация типовых звеньев. Простейшие типовые звенья.
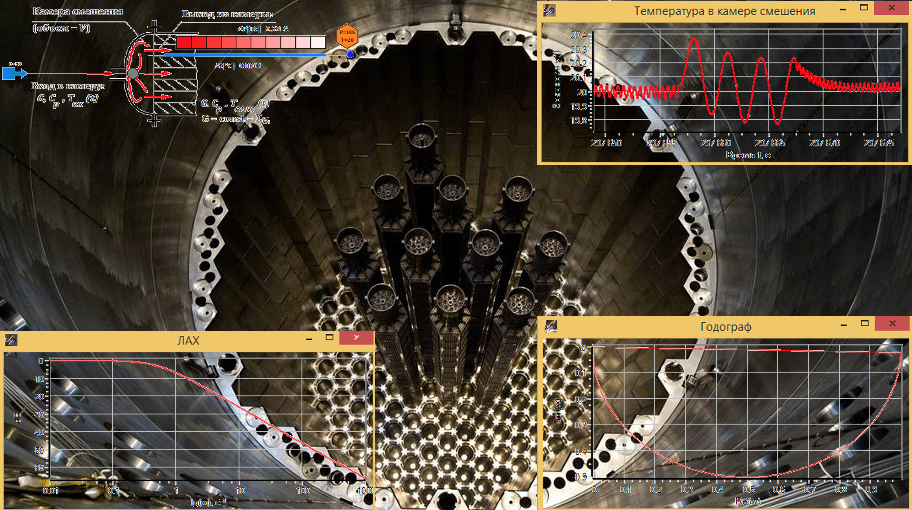
3.3. Апериодическое звено 1–го порядка инерционноезвено. На примере входной камеры ядерного реактора.
3.4. Апериодическое звено 2-го порядка.
3.6. Инерционно-дифференцирующее звено.
3.7. Форсирующее звено .
3.8. Инерционно-дифференцирующее звено.
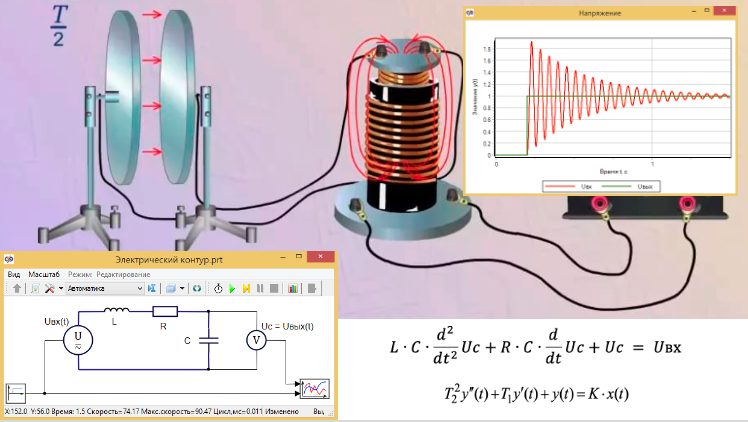
Тема сегодняшней статьи: 3.2. Колебательное звено
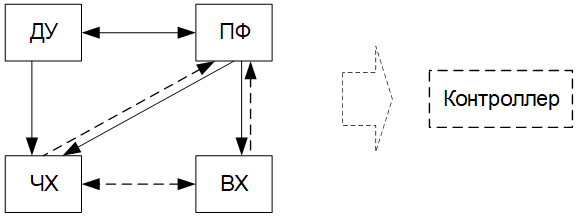
Будет как всегда интересно познавательно и жестко. Зато в конце мы создадим виртуальный стенд с электрическим контуром и сможем им поуправлять в "ручном" режиме.